 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Device and Method to Identify Hip, Knee and Ankle Joint Impedance During Walking
Paper and Code
Dec 10, 2021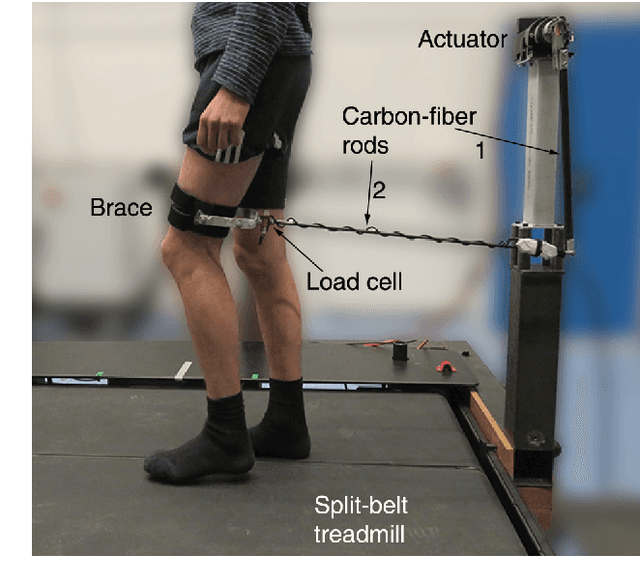
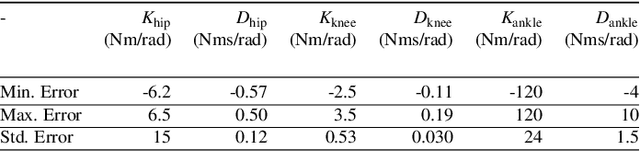

Knowledge on joint impedance during walking in various conditions is relevant for clinical decision making and the development of robotic gait trainers, leg prostheses, leg orthotics, and wearable exoskeletons. Whereas ankle impedance during walking has been experimentally assessed, knee and hip joint impedance during walking have not been identified yet. Here we developed and evaluated a lower limb perturbator to identify hip, knee and ankle joint impedance during treadmill walking. The lower limb perturbator (LOPER) consists of an actuator connected to the thigh via rods. The LOPER allows to apply force perturbations to a free-hanging leg, while standing on the contralateral leg, with a bandwidth of up to 39Hz. While walking in minimal impedance mode, the interaction forces between LOPER and the thigh were low (<5N) and the effect on the walking pattern was smaller than the within-subject variability during normal walking. Using a non-linear multibody dynamical model of swing leg dynamics, the hip, knee and ankle joint impedance were estimated at three time points during the swing phase for nine subjects walking at a speed of 0.5 m/s. The identified model was well able to predict the experimental responses, since the mean variance accounted for was 99%, 96%, and 77%, for the hip, knee and ankle respectively. The averaged across subjects stiffness varied between the three time point within 34-66 Nm/rad, 0-3.5 Nm/rad, and 2.5-24 Nm/rad for the hip, knee and ankle joint respectively. The damping varied between 1.9-4.6 Nms/rad, 0.02-0.14 Nms/rad, and 0.2-2.4 Nms/rad for hip, knee, and ankle respectively. The developed LOPER has a negligible effect on the unperturbed walking pattern and allows to identify hip, knee and ankle joint impedance during the swing phase.