 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation and comparison of SEA torque controllers in a unified framework
Jan 03, 2022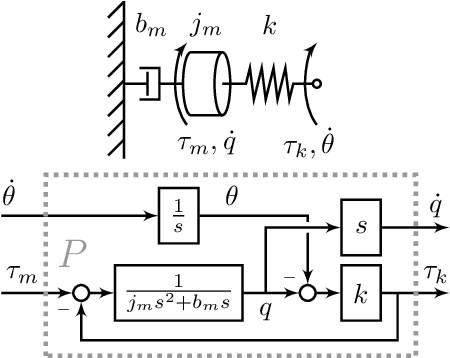
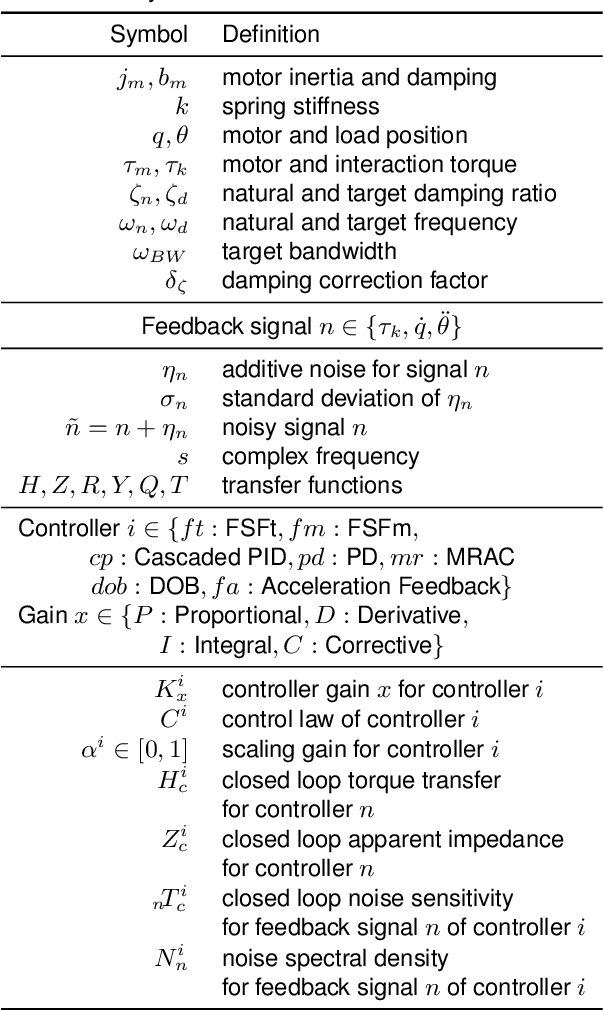
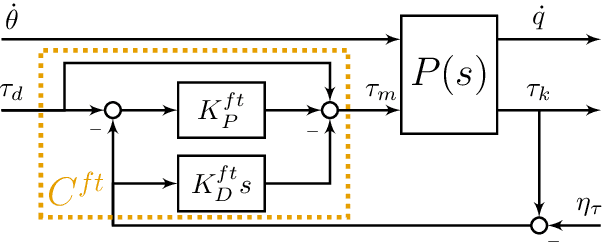
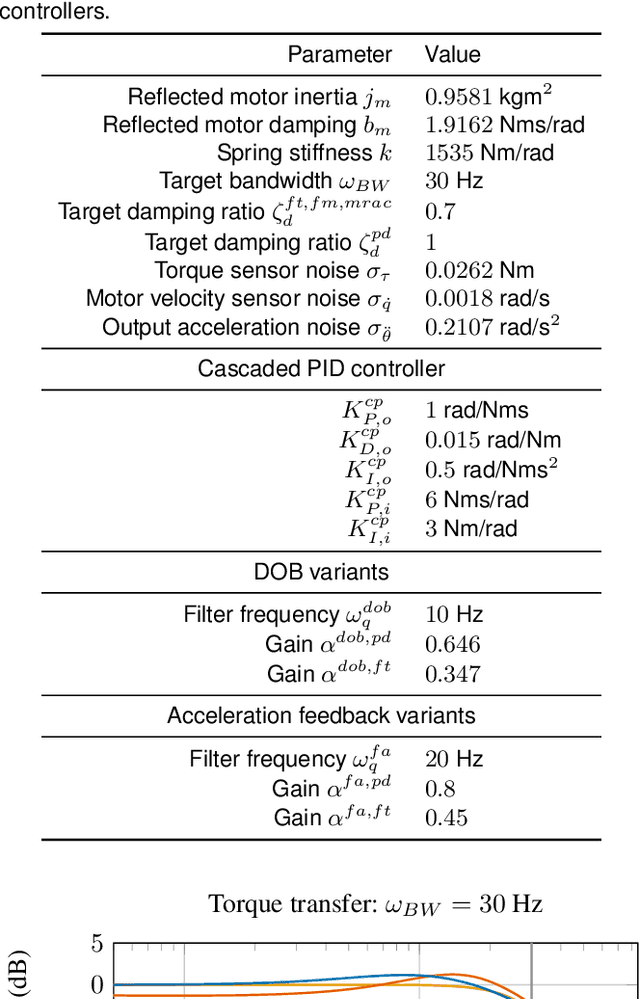
Series elastic actuators (SEA) with their inherent compliance offer a safe torque source for robots that are interacting with various environments, including humans. These applications have high requirements for the SEA torque controllers, both in the torque response as well as interaction behavior with its the environment. To differentiate state of the art torque controllers, this work is introducing a unifying theoretical and experimental framework that compares controllers based on their torque transfer behavior, their apparent impedance behavior, and especially the passivity of the apparent impedance, i.e. their interaction stability, as well as their sensitivity to sensor noise. We compare classical SEA control approaches such as cascaded PID controllers and full state feedback controllers with advanced controllers using disturbance observers, acceleration feedback and adaptation rules. Simulations and experiments demonstrate the trade-off between stable interactions, high bandwidths and low noise levels. Based on these tradeoffs, an application specific controller can be designed and tuned, based on desired interaction with the respective environment.
Neuromechanical model-based control of bi-lateral ankle exoskeletons: biological joint torque and electromyogram reduction across walking conditions
Aug 02, 2021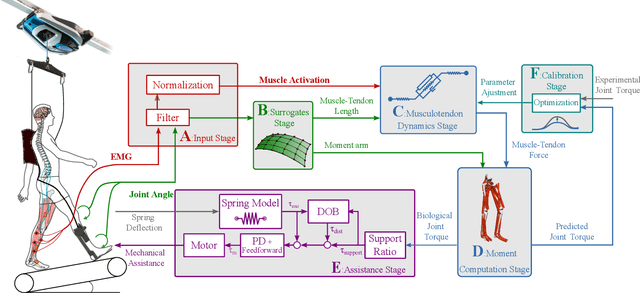
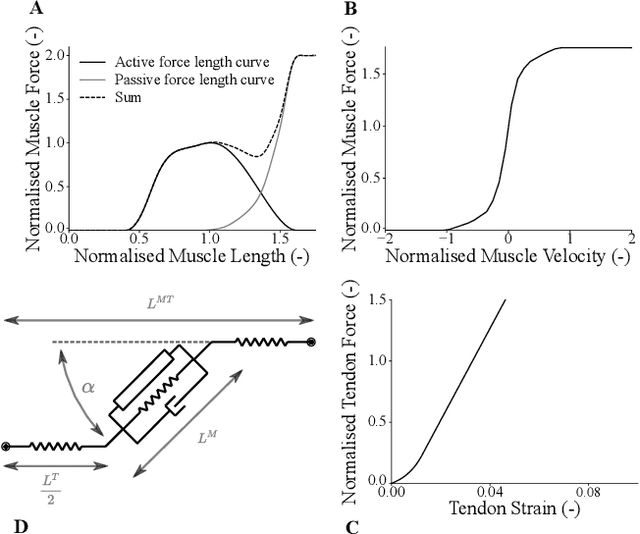
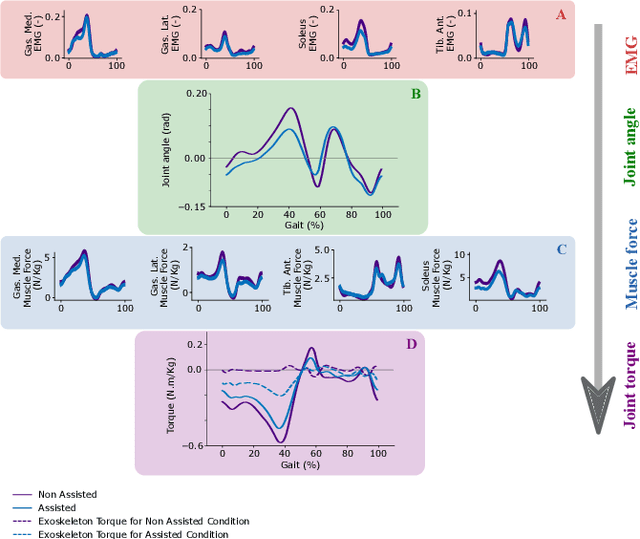
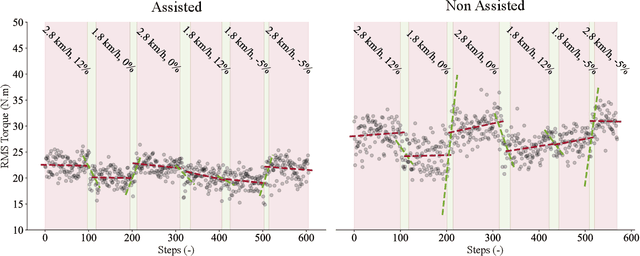
To enable the broad adoption of wearable robotic exoskeletons in medical and industrial settings, it is crucial they can effectively support large repertoires of movements. We propose a new human-machine interface to drive bilateral ankle exoskeletons during a range of 'unseen' walking conditions that were not used for establishing the control interface. The proposed approach uses person-specific neuromechanical models of the human body to estimate biological ankle torques in real-time from electromyograms (EMGS) and joint angles. A low-level controller based on a disturbance observer translates biological torque estimates into exoskeleton commands. We call this 'neuromechanical model-based control' (NMBC). NMBC enabled five individuals to voluntarily control exoskeletons across two walking speeds performed at three ground elevations with no need for predefined torque profiles, nor a prior chosen neuromuscular reflex rules, or state machines as common in literature. Furthermore, a single subject case study was carried out on a dexterous moonwalk task, showing reduction in muscular effort. NMBC enabled reducing biological ankle torques as well as eight ankle muscle EMGs both within (22% for the torque; 13% for the EMG) and between walking conditions (22% for the torque; 13% for the EMG) when compared to non-assisted conditions. Torque and EMG reduction in novel walking conditions indicated the exoskeleton operated symbiotically as an exomuscle controlled by the operator's neuromuscular system. This will open new avenues for systematic adoption of wearable robots in out-of-the-lab medical and occupational settings.