 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuromuscular Modeling for Locomotion with Wearable Assistive Robots -- A primer
Jul 19, 2024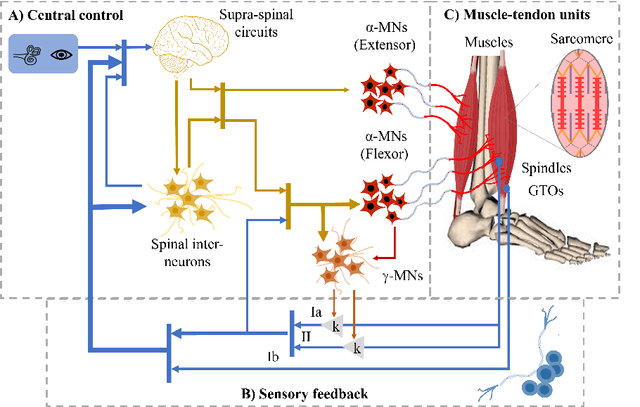
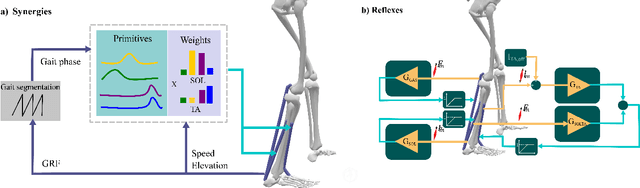

Wearable assistive robots (WR) for the lower extremity are extensively documented in literature. Various interfaces have been designed to control these devices during gait and balance activities. However, achieving seamless and intuitive control requires accurate modeling of the human neuromusculoskeletal (NMSK) system. Such modeling enables WR to anticipate user intentions and determine the necessary joint assistance. Despite the existence of controllers interfacing with the NMSK system, robust and generalizable techniques across different tasks remain scarce. Designing these novel controllers necessitates the combined expertise of neurophysiologists, who understand the physiology of movement initiation and generation, and biomechatronic engineers, who design and control devices that assist movement. This paper aims to bridge the gaps between these fields by presenting a primer on key concepts and the current state of the science in each area. We present three main sections: the neuromechanics of locomotion, neuromechanical models of movement, and existing neuromechanical controllers used in WR. Through these sections, we provide a comprehensive overview of seminal studies in the field, facilitating collaboration between neurophysiologists and biomechatronic engineers for future advances in wearable robotics for locomotion.