 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePellet-based 3D Printing of Soft Thermoplastic Elastomeric Membranes for Soft Robotic Applications
Mar 26, 2025Additive Manufacturing (AM) is a promising solution for handling the complexity of fabricating soft robots. However, the AM of hyperelastic materials is still challenging with limited material types. Within this work, pellet-based 3D printing of very soft thermoplastic elastomers (TPEs) was explored. Our results show that TPEs can have similar engineering stress and maximum strain as Ecoflex OO-10. These TPEs were used to 3D-print airtight thin membranes (0.2-1.2 mm), which could inflate up to a stretch of 1320\%. Combining the membrane's large expansion and softness with the 3D printing of hollow structures simplified the design of a bending actuator that can bend 180 degrees and reach a blocked force of 238 times its weight. In addition, by 3D printing TPE pellets and rigid filaments, the soft membrane could grasp objects by enveloping an object or as a sensorized sucker, which relied on the TPE's softness to conform to the object or act as a seal. In addition, the membrane of the sucker was utilized as a tactile sensor to detect an object before adhesion. These results suggest the feasibility of 3D printing soft robots by using soft TPEs and membranes as an interesting class of materials and sensorized actuators, respectively.
From Problem to Solution: Bio-inspired 3D Printing for Bonding Soft and Rigid Materials via Underextrusions
Aug 02, 2024



Vertebrate animals benefit from a combination of rigidity for structural support and softness for adaptation. Similarly, integrating rigidity and softness can enhance the versatility of soft robotics. However, the challenges associated with creating durable bonding interfaces between soft and rigid materials have limited the development of hybrid robots. Existing solutions require specialized machinery, such as polyjet 3D printers, which are not commonly available. In response to these challenges, we have developed a 3D printing technique that can be used with almost all commercially available FDM printers. This technique leverages the common issue of underextrusion to create a strong bond between soft and rigid materials. Underextrusion generates a porous structure, similar to fibrous connective tissues, that provides a robust interface with the rigid part through layer fusion, while the porosity enables interlocking with the soft material. Our experiments demonstrated that this method outperforms conventional adhesives commonly used in soft robotics, achieving nearly 200\% of the bonding strength in both lap shear and peeling tests. Additionally, we investigated how different porosity levels affect bonding strength. We tested the technique under pressure scenarios critical to soft and hybrid robots and achieved three times more pressure than the current adhesion solution. Finally, we fabricated various hybrid robots using this technique to demonstrate the wide range of capabilities this approach and hybridity can bring to soft robotics. has context menu
3D Printed Graded Porous Sensors for Soft Sensorized Insoles with Gait Phase & Ground Reaction Forces Estimation
Mar 08, 2023Sensorized insoles provide a tool to perform gait studies and health monitoring during daily life. These sensorized insoles need to be comfortable and lightweight to be accepted. Previous work has already demonstrated that sensorized insoles are possible and can estimate both ground reaction force and gait cycle. However, these are often assemblies of commercial components restricting design freedom and flexibility. Within this work, we investigate the feasibility of using four 3D-printed porous (foam-like) piezoresistive sensors embedded in a commercial insole. These sensors were evaluated using an instrumented treadmill as the golden standard. It was observed that the four sensors behaved in line with the expected change in pressure distribution during the gait cycle. In addition, Hammerstein-Wiener models were identified that were capable of estimating the vertical and mediolateral ground reaction forces (GRFs). Their NRMSE fits were on average 82% and 73%, respectively. Similarly, for the averaged gait cycle the R^2 values were 0.98 and 0.99 with normalized RMS errors overall below 6%. These values were comparable with other insoles based on commercial force sensing resistors but at a significantly lower cost (over four times cheaper). Thereby indicating that our 3D-printed sensors can be an interesting option for sensorized insoles. The advantage of 3D printing these sensors is that it allows for significantly more design freedom, reduces assembly, and is cheaper. However, further research is needed to exploit this design freedom for complex sensors, estimate the anteroposterior GRF, and fully 3D print the entire insole.
3D Printed Proprioceptive Soft Fluidic Actuators with graded porosity
Feb 25, 2023Integration of both actuation and proprioception into the robot body enables sensorized soft actuators that can operate in a closed loop. An interesting class of actuators for this purpose are graded porous actuators, which can be mechanically programmed by their porosity (gradient) and sensorized by using a smart material. Three types of such actuators were 3D printed, namely: a bending finger, contractor, and a three DoF bending segment. Piezoresistive sensing was embedded by printing with a conductive thermoplastic elastomer. A challenge with piezoresistive sensors is to relate the change in resistance to deformation due to their inherent hysteresis and nonlinearity. In this work, an (estimated) Wiener-Hammerstein (WH) model was used to predict the deformation. The bending and contracting actuators showed that the linear and WH models could reach 70+% and 80+% fits, respectively. Thereby indicating that the deformation of the printed actuators could be estimated quite well. Similarly, the 3DoF bending segment showed similar values with the WH model reducing both the fitting and RMS error on average with 20+%. These results indicate that sensorized actuators based on 3D-printed soft structures with a porosity gradient can be mechanically programmed whereas strain estimation can be done using identified Wiener-Hammerstein models.
A Bioinspired Stiffness Tunable Sucker for Passive Adaptation and Firm Attachment to Angular Substrates
Oct 26, 2022



The ability to adapt and conform to angular and uneven surfaces improves the suction cup's performance in grasping and manipulation. However, in most cases, the adaptation costs lack of required stiffness for manipulation after surface attachment; thus, the ideal scenario is to have compliance during adaptation and stiffness after attachment to the surface. Nevertheless, most stiffness modulation techniques in suction cups require additional actuation. This article presents a new stiffness tunable suction cup that adapts to steep angular surfaces. Using granular jamming as a vacuum driven stiffness modulation provides a sensorless for activating the mechanism. Thus, the design is composed of a conventional active suction pad connected to a granular stalk, emulating a hinge behavior that is compliant during adaptation and has high stiffness after attachment is ensured. During the experiment, the suction cup can adapt to angles up to 85 degrees with force lower than 0.5 N. We also investigated the effect of granular stalk's length on the adaptation and how this design performs compared to passive adaptation without stiffness modulation.
Direct 3D Printing of Soft Fluidic Actuators with Graded Porosity
Apr 26, 2022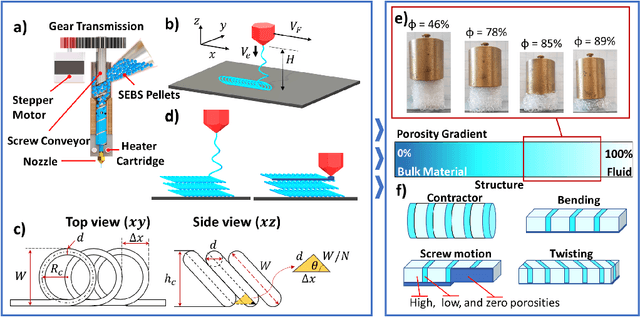
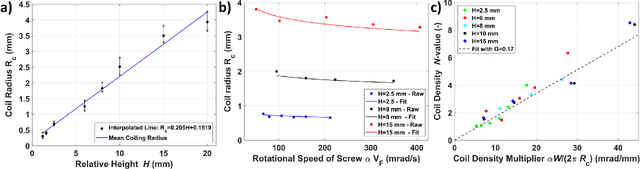
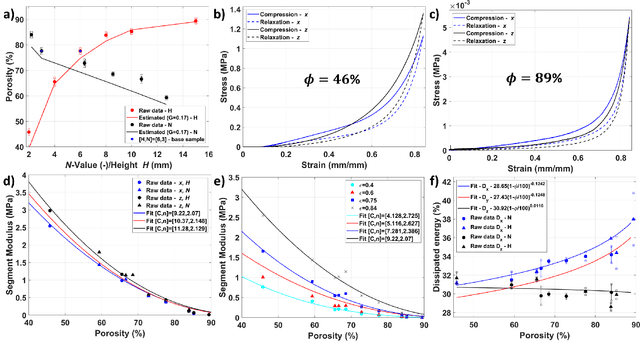
New additive manufacturing methods are needed to realize more complex soft robots. One example is soft fluidic robotics, which exploits fluidic power and stiffness gradients. Porous structures are an interesting type for this approach, as they are flexible and allow for fluid transport. Within this work, the Infill-Foam (InFoam) is proposed to print structures with graded porosity by liquid rope coiling (LRC). By exploiting LRC, the InFoam method could exploit the repeatable coiling patterns to print structures. To this end, only the characterization of the relation between nozzle height and coil radius and the extruded length were necessary (at a fixed temperature). Then by adjusting the nozzle height and/or extrusion speed the porosity of the printed structure could be set. The InFoam method was demonstrated by printing porous structures using styrene-ethylene-butylene-styrene (SEBS) with porosities ranging from 46\% to 89\%. In compression tests, the cubes showed large changes in modulus (more than 200 times), density (-89\% compared to bulk), and energy dissipation. The InFoam method combined coiling and normal plotting to realize a large range of porosity gradients. This grading was exploited to realize rectangular structures with varying deformation patterns, which included twisting, contraction, and bending. Furthermore, the InFoam method was shown to be capable of programming the behavior of bending actuators by varying the porosity. Both the output force and stroke showed correlations similar to those of the cubes. Thus, the InFoam method can fabricate and program the mechanical behavior of a soft fluidic (porous) actuator by grading porosity.