 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMindDrive: A Vision-Language-Action Model for Autonomous Driving via Online Reinforcement Learning
Dec 16, 2025


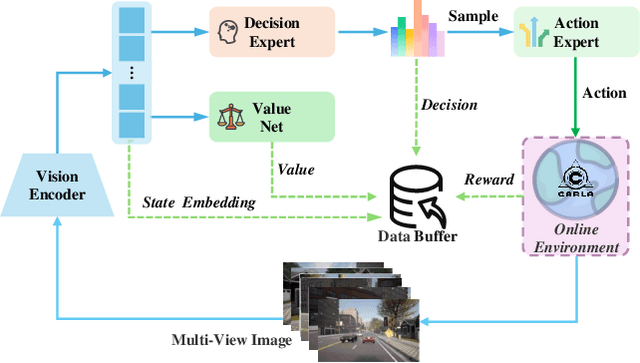
Current Vision-Language-Action (VLA) paradigms in autonomous driving primarily rely on Imitation Learning (IL), which introduces inherent challenges such as distribution shift and causal confusion. Online Reinforcement Learning offers a promising pathway to address these issues through trial-and-error learning. However, applying online reinforcement learning to VLA models in autonomous driving is hindered by inefficient exploration in continuous action spaces. To overcome this limitation, we propose MindDrive, a VLA framework comprising a large language model (LLM) with two distinct sets of LoRA parameters. The one LLM serves as a Decision Expert for scenario reasoning and driving decision-making, while the other acts as an Action Expert that dynamically maps linguistic decisions into feasible trajectories. By feeding trajectory-level rewards back into the reasoning space, MindDrive enables trial-and-error learning over a finite set of discrete linguistic driving decisions, instead of operating directly in a continuous action space. This approach effectively balances optimal decision-making in complex scenarios, human-like driving behavior, and efficient exploration in online reinforcement learning. Using the lightweight Qwen-0.5B LLM, MindDrive achieves Driving Score (DS) of 78.04 and Success Rate (SR) of 55.09% on the challenging Bench2Drive benchmark. To the best of our knowledge, this is the first work to demonstrate the effectiveness of online reinforcement learning for the VLA model in autonomous driving.
Extending Large Vision-Language Model for Diverse Interactive Tasks in Autonomous Driving
May 13, 2025



The Large Visual-Language Models (LVLMs) have significantly advanced image understanding. Their comprehension and reasoning capabilities enable promising applications in autonomous driving scenarios. However, existing research typically focuses on front-view perspectives and partial objects within scenes, struggling to achieve comprehensive scene understanding. Meanwhile, existing LVLMs suffer from the lack of mapping relationship between 2D and 3D and insufficient integration of 3D object localization and instruction understanding. To tackle these limitations, we first introduce NuInteract, a large-scale dataset with over 1.5M multi-view image language pairs spanning dense scene captions and diverse interactive tasks. Furthermore, we propose DriveMonkey, a simple yet effective framework that seamlessly integrates LVLMs with a spatial processor using a series of learnable queries. The spatial processor, designed as a plug-and-play component, can be initialized with pre-trained 3D detectors to improve 3D perception. Our experiments show that DriveMonkey outperforms general LVLMs, especially achieving a 9.86% notable improvement on the 3D visual grounding task. The dataset and code will be released at https://github.com/zc-zhao/DriveMonkey.
ORION: A Holistic End-to-End Autonomous Driving Framework by Vision-Language Instructed Action Generation
Mar 25, 2025End-to-end (E2E) autonomous driving methods still struggle to make correct decisions in interactive closed-loop evaluation due to limited causal reasoning capability. Current methods attempt to leverage the powerful understanding and reasoning abilities of Vision-Language Models (VLMs) to resolve this dilemma. However, the problem is still open that few VLMs for E2E methods perform well in the closed-loop evaluation due to the gap between the semantic reasoning space and the purely numerical trajectory output in the action space. To tackle this issue, we propose ORION, a holistic E2E autonomous driving framework by vision-language instructed action generation. ORION uniquely combines a QT-Former to aggregate long-term history context, a Large Language Model (LLM) for driving scenario reasoning, and a generative planner for precision trajectory prediction. ORION further aligns the reasoning space and the action space to implement a unified E2E optimization for both visual question-answering (VQA) and planning tasks. Our method achieves an impressive closed-loop performance of 77.74 Driving Score (DS) and 54.62% Success Rate (SR) on the challenge Bench2Drive datasets, which outperforms state-of-the-art (SOTA) methods by a large margin of 14.28 DS and 19.61% SR.
Local Geometry of One-Hidden-Layer Neural Networks for Logistic Regression
Feb 18, 2018
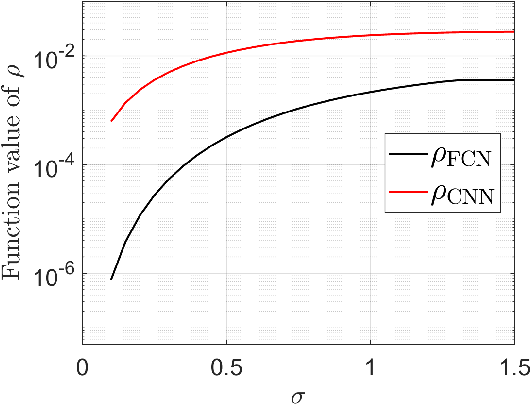
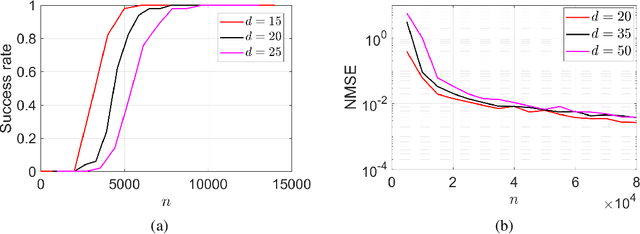

We study the local geometry of a one-hidden-layer fully-connected neural network where the training samples are generated from a multi-neuron logistic regression model. We prove that under Gaussian input, the empirical risk function employing quadratic loss exhibits strong convexity and smoothness uniformly in a local neighborhood of the ground truth, for a class of smooth activation functions satisfying certain properties, including sigmoid and tanh, as soon as the sample complexity is sufficiently large. This implies that if initialized in this neighborhood, gradient descent converges linearly to a critical point that is provably close to the ground truth without requiring a fresh set of samples at each iteration. This significantly improves upon prior results on learning shallow neural networks with multiple neurons. To the best of our knowledge, this is the first global convergence guarantee for one-hidden-layer neural networks using gradient descent over the empirical risk function without resampling at the near-optimal sampling and computational complexity.
Subspace Learning From Bits
Jan 03, 2017
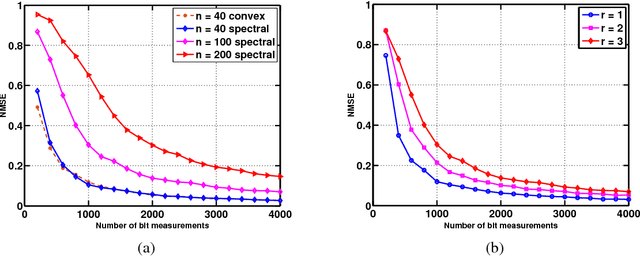
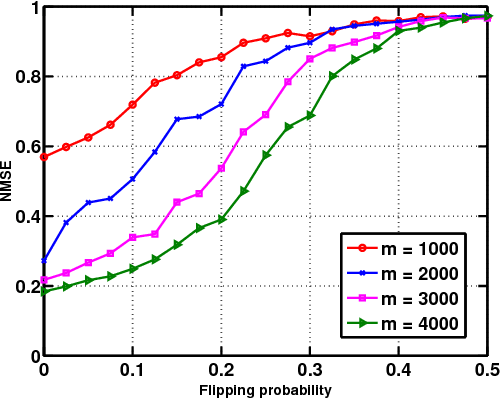

Networked sensing, where the goal is to perform complex inference using a large number of inexpensive and decentralized sensors, has become an increasingly attractive research topic due to its applications in wireless sensor networks and internet-of-things. To reduce the communication, sensing and storage complexity, this paper proposes a simple sensing and estimation framework to faithfully recover the principal subspace of high-dimensional data streams using a collection of binary measurements from distributed sensors, without transmitting the whole data. The binary measurements are designed to indicate comparison outcomes of aggregated energy projections of the data samples over pairs of randomly selected directions. When the covariance matrix is a low-rank matrix, we propose a spectral estimator that recovers the principal subspace of the covariance matrix as the subspace spanned by the top eigenvectors of a properly designed surrogate matrix, which is provably accurate as soon as the number of binary measurements is sufficiently large. An adaptive rank selection strategy based on soft thresholding is also presented. Furthermore, we propose a tailored spectral estimator when the covariance matrix is additionally Toeplitz, and show reliable estimation can be obtained from a substantially smaller number of binary measurements. Our results hold even when a constant fraction of the binary measurements is randomly flipped. Finally, we develop a low-complexity online algorithm to track the principal subspace when new measurements arrive sequentially. Numerical examples are provided to validate the proposed approach.