 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Sequential Neural Network with Spatial-Temporal Attention and Linear LSTM for Robust Lane Detection Using Multi-Frame Images
Feb 03, 2026Lane detection is a crucial perception task for all levels of automated vehicles (AVs) and Advanced Driver Assistance Systems, particularly in mixed-traffic environments where AVs must interact with human-driven vehicles (HDVs) and challenging traffic scenarios. Current methods lack versatility in delivering accurate, robust, and real-time compatible lane detection, especially vision-based methods often neglect critical regions of the image and their spatial-temporal (ST) salience, leading to poor performance in difficult circumstances such as serious occlusion and dazzle lighting. This study introduces a novel sequential neural network model with a spatial-temporal attention mechanism to focus on key features of lane lines and exploit salient ST correlations among continuous image frames. The proposed model, built on a standard encoder-decoder structure and common neural network backbones, is trained and evaluated on three large-scale open-source datasets. Extensive experiments demonstrate the strength and robustness of the proposed model, outperforming state-of-the-art methods in various testing scenarios. Furthermore, with the ST attention mechanism, the developed sequential neural network models exhibit fewer parameters and reduced Multiply-Accumulate Operations (MACs) compared to baseline sequential models, highlighting their computational efficiency. Relevant data, code, and models are released at https://doi.org/10.4121/4619cab6-ae4a-40d5-af77-582a77f3d821.
Towards Developing Socially Compliant Automated Vehicles: State of the Art, Experts Expectations, and A Conceptual Framework
Jan 10, 2025Automated Vehicles (AVs) hold promise for revolutionizing transportation by improving road safety, traffic efficiency, and overall mobility. Despite the steady advancement in high-level AVs in recent years, the transition to full automation entails a period of mixed traffic, where AVs of varying automation levels coexist with human-driven vehicles (HDVs). Making AVs socially compliant and understood by human drivers is expected to improve the safety and efficiency of mixed traffic. Thus, ensuring AVs compatibility with HDVs and social acceptance is crucial for their successful and seamless integration into mixed traffic. However, research in this critical area of developing Socially Compliant AVs (SCAVs) remains sparse. This study carries out the first comprehensive scoping review to assess the current state of the art in developing SCAVs, identifying key concepts, methodological approaches, and research gaps. An expert interview was also conducted to identify critical research gaps and expectations towards SCAVs. Based on the scoping review and expert interview input, a conceptual framework is proposed for the development of SCAVs. The conceptual framework is evaluated using an online survey targeting researchers, technicians, policymakers, and other relevant professionals worldwide. The survey results provide valuable validation and insights, affirming the significance of the proposed conceptual framework in tackling the challenges of integrating AVs into mixed-traffic environments. Additionally, future research perspectives and suggestions are discussed, contributing to the research and development agenda of SCAVs.
Understanding cyclists' perception of driverless vehicles through eye-tracking and interviews
Aug 19, 2024As automated vehicles (AVs) become increasingly popular, the question arises as to how cyclists will interact with such vehicles. This study investigated (1) whether cyclists spontaneously notice if a vehicle is driverless, (2) how well they perform a driver-detection task when explicitly instructed, and (3) how they carry out such tasks. Using a Wizard-of-Oz method, 37 participants cycled a designated route and encountered an AV multiple times in two experimental sessions. In Session 1, participants cycled the route uninstructed, while in Session 2, they were instructed to verbally report whether they detected the presence or absence of a driver. Additionally, we recorded the participants' gaze behaviour with eye-tracking and their responses in post-session interviews. The interviews revealed that 30% of the cyclists spontaneously mentioned the absence of a driver (Session 1), and when instructed (Session 2), they detected the absence and presence of the driver with 93% accuracy. The eye-tracking data showed that cyclists looked more frequently and longer at the vehicle in Session 2 compared to Session 1. Furthermore, participants exhibited intermittent sampling of the vehicle, and they looked in front of the vehicle when it was far away and towards the windshield region when it was closer. The post-session interviews also indicated that participants were curious, felt safe, and reported a need to receive information about the AV's driving state. In conclusion, cyclists can detect the absence of a driver in the AV, and this detection may influence their perceptions of safety. Further research is needed to explore these findings in real-world traffic conditions.
Intelligent Anomaly Detection for Lane Rendering Using Transformer with Self-Supervised Pre-Training and Customized Fine-Tuning
Dec 07, 2023The burgeoning navigation services using digital maps provide great convenience to drivers. Nevertheless, the presence of anomalies in lane rendering map images occasionally introduces potential hazards, as such anomalies can be misleading to human drivers and consequently contribute to unsafe driving conditions. In response to this concern and to accurately and effectively detect the anomalies, this paper transforms lane rendering image anomaly detection into a classification problem and proposes a four-phase pipeline consisting of data pre-processing, self-supervised pre-training with the masked image modeling (MiM) method, customized fine-tuning using cross-entropy based loss with label smoothing, and post-processing to tackle it leveraging state-of-the-art deep learning techniques, especially those involving Transformer models. Various experiments verify the effectiveness of the proposed pipeline. Results indicate that the proposed pipeline exhibits superior performance in lane rendering image anomaly detection, and notably, the self-supervised pre-training with MiM can greatly enhance the detection accuracy while significantly reducing the total training time. For instance, employing the Swin Transformer with Uniform Masking as self-supervised pretraining (Swin-Trans-UM) yielded a heightened accuracy at 94.77% and an improved Area Under The Curve (AUC) score of 0.9743 compared with the pure Swin Transformer without pre-training (Swin-Trans) with an accuracy of 94.01% and an AUC of 0.9498. The fine-tuning epochs were dramatically reduced to 41 from the original 280. In conclusion, the proposed pipeline, with its incorporation of self-supervised pre-training using MiM and other advanced deep learning techniques, emerges as a robust solution for enhancing the accuracy and efficiency of lane rendering image anomaly detection in digital navigation systems.
Data-driven Semi-supervised Machine Learning with Surrogate Safety Measures for Abnormal Driving Behavior Detection
Dec 07, 2023Detecting abnormal driving behavior is critical for road traffic safety and the evaluation of drivers' behavior. With the advancement of machine learning (ML) algorithms and the accumulation of naturalistic driving data, many ML models have been adopted for abnormal driving behavior detection. Most existing ML-based detectors rely on (fully) supervised ML methods, which require substantial labeled data. However, ground truth labels are not always available in the real world, and labeling large amounts of data is tedious. Thus, there is a need to explore unsupervised or semi-supervised methods to make the anomaly detection process more feasible and efficient. To fill this research gap, this study analyzes large-scale real-world data revealing several abnormal driving behaviors (e.g., sudden acceleration, rapid lane-changing) and develops a Hierarchical Extreme Learning Machines (HELM) based semi-supervised ML method using partly labeled data to accurately detect the identified abnormal driving behaviors. Moreover, previous ML-based approaches predominantly utilize basic vehicle motion features (such as velocity and acceleration) to label and detect abnormal driving behaviors, while this study seeks to introduce Surrogate Safety Measures (SSMs) as the input features for ML models to improve the detection performance. Results from extensive experiments demonstrate the effectiveness of the proposed semi-supervised ML model with the introduced SSMs serving as important features. The proposed semi-supervised ML method outperforms other baseline semi-supervised or unsupervised methods regarding various metrics, e.g., delivering the best accuracy at 99.58% and the best F-1 measure at 0.9913. The ablation study further highlights the significance of SSMs for advancing detection performance.
A cognitive process approach to modeling gap acceptance in overtaking
Jun 08, 2023Driving automation holds significant potential for enhancing traffic safety. However, effectively handling interactions with human drivers in mixed traffic remains a challenging task. Several models exist that attempt to capture human behavior in traffic interactions, often focusing on gap acceptance. However, it is not clear how models of an individual driver's gap acceptance can be translated to dynamic human-AV interactions in the context of high-speed scenarios like overtaking. In this study, we address this issue by employing a cognitive process approach to describe the dynamic interactions by the oncoming vehicle during overtaking maneuvers. Our findings reveal that by incorporating an initial decision-making bias dependent on the initial velocity into existing drift-diffusion models, we can accurately describe the qualitative patterns of overtaking gap acceptance observed previously. Our results demonstrate the potential of the cognitive process approach in modeling human overtaking behavior when the oncoming vehicle is an AV. To this end, this study contributes to the development of effective strategies for ensuring safe and efficient overtaking interactions between human drivers and AVs.
A Hybrid Spatial-temporal Deep Learning Architecture for Lane Detection
Oct 14, 2021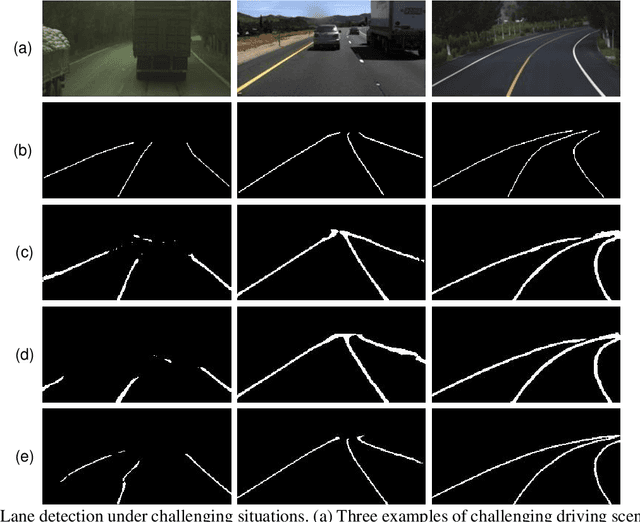
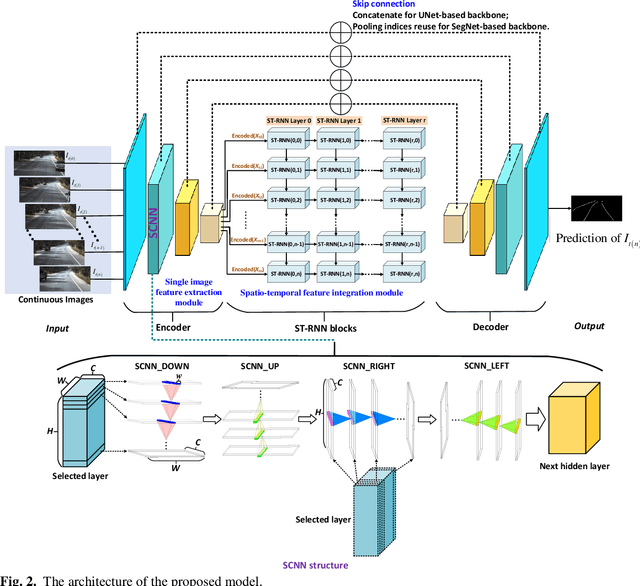
Reliable and accurate lane detection is of vital importance for the safe performance of Lane Keeping Assistance and Lane Departure Warning systems. However, under certain challenging peculiar circumstances, it is difficult to get satisfactory performance in accurately detecting the lanes from one single image which is often the case in current literature. Since lane markings are continuous lines, the lanes that are difficult to be accurately detected in the single current image can potentially be better deduced if information from previous frames is incorporated. This study proposes a novel hybrid spatial-temporal sequence-to-one deep learning architecture making full use of the spatial-temporal information in multiple continuous image frames to detect lane markings in the very last current frame. Specifically, the hybrid model integrates the single image feature extraction module with the spatial convolutional neural network (SCNN) embedded for excavating spatial features and relationships in one single image, the spatial-temporal feature integration module with spatial-temporal recurrent neural network (ST-RNN), which can capture the spatial-temporal correlations and time dependencies among image sequences, and the encoder-decoder structure, which makes this image segmentation problem work in an end-to-end supervised learning format. Extensive experiments reveal that the proposed model can effectively handle challenging driving scenes and outperforms available state-of-the-art methods with a large margin.