 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Spatial-temporal Deep Learning Architecture for Lane Detection
Paper and Code
Oct 14, 2021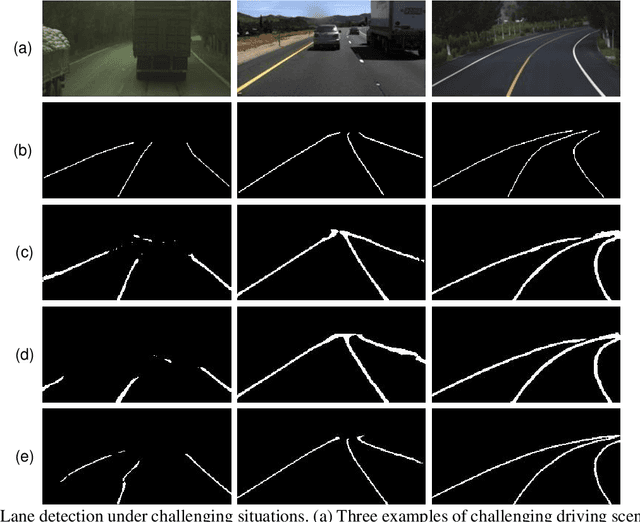
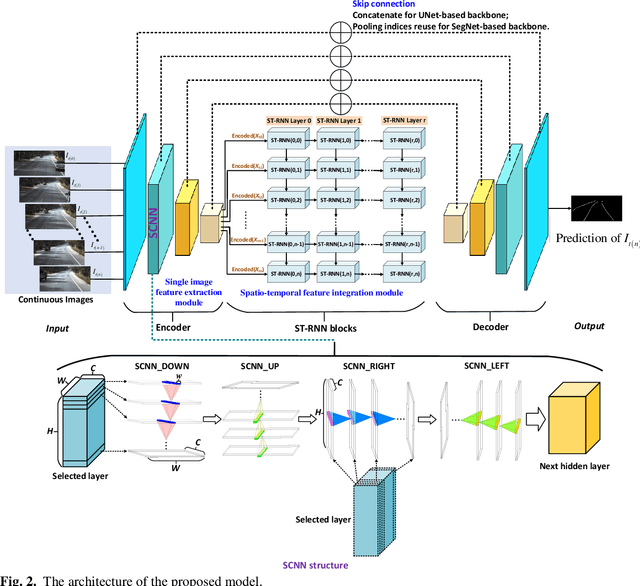
Reliable and accurate lane detection is of vital importance for the safe performance of Lane Keeping Assistance and Lane Departure Warning systems. However, under certain challenging peculiar circumstances, it is difficult to get satisfactory performance in accurately detecting the lanes from one single image which is often the case in current literature. Since lane markings are continuous lines, the lanes that are difficult to be accurately detected in the single current image can potentially be better deduced if information from previous frames is incorporated. This study proposes a novel hybrid spatial-temporal sequence-to-one deep learning architecture making full use of the spatial-temporal information in multiple continuous image frames to detect lane markings in the very last current frame. Specifically, the hybrid model integrates the single image feature extraction module with the spatial convolutional neural network (SCNN) embedded for excavating spatial features and relationships in one single image, the spatial-temporal feature integration module with spatial-temporal recurrent neural network (ST-RNN), which can capture the spatial-temporal correlations and time dependencies among image sequences, and the encoder-decoder structure, which makes this image segmentation problem work in an end-to-end supervised learning format. Extensive experiments reveal that the proposed model can effectively handle challenging driving scenes and outperforms available state-of-the-art methods with a large margin.