 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOGDet: Semantic-Occupancy Guided Multi-view 3D Object Detection
Aug 26, 2023In the field of autonomous driving, accurate and comprehensive perception of the 3D environment is crucial. Bird's Eye View (BEV) based methods have emerged as a promising solution for 3D object detection using multi-view images as input. However, existing 3D object detection methods often ignore the physical context in the environment, such as sidewalk and vegetation, resulting in sub-optimal performance. In this paper, we propose a novel approach called SOGDet (Semantic-Occupancy Guided Multi-view 3D Object Detection), that leverages a 3D semantic-occupancy branch to improve the accuracy of 3D object detection. In particular, the physical context modeled by semantic occupancy helps the detector to perceive the scenes in a more holistic view. Our SOGDet is flexible to use and can be seamlessly integrated with most existing BEV-based methods. To evaluate its effectiveness, we apply this approach to several state-of-the-art baselines and conduct extensive experiments on the exclusive nuScenes dataset. Our results show that SOGDet consistently enhance the performance of three baseline methods in terms of nuScenes Detection Score (NDS) and mean Average Precision (mAP). This indicates that the combination of 3D object detection and 3D semantic occupancy leads to a more comprehensive perception of the 3D environment, thereby aiding build more robust autonomous driving systems. The codes are available at: https://github.com/zhouqiu/SOGDet.
ShapeConv: Shape-aware Convolutional Layer for Indoor RGB-D Semantic Segmentation
Aug 24, 2021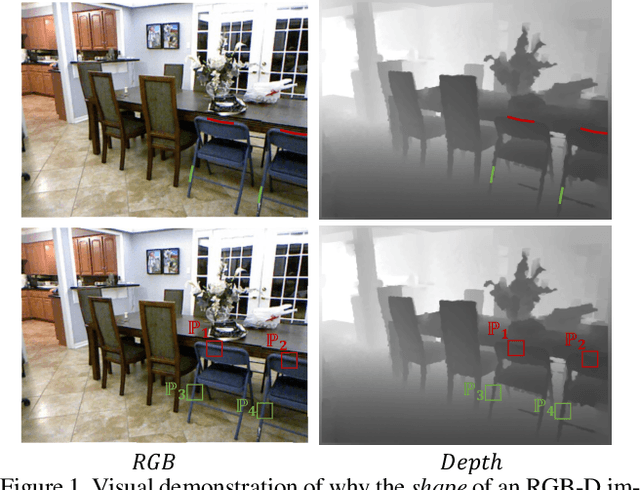
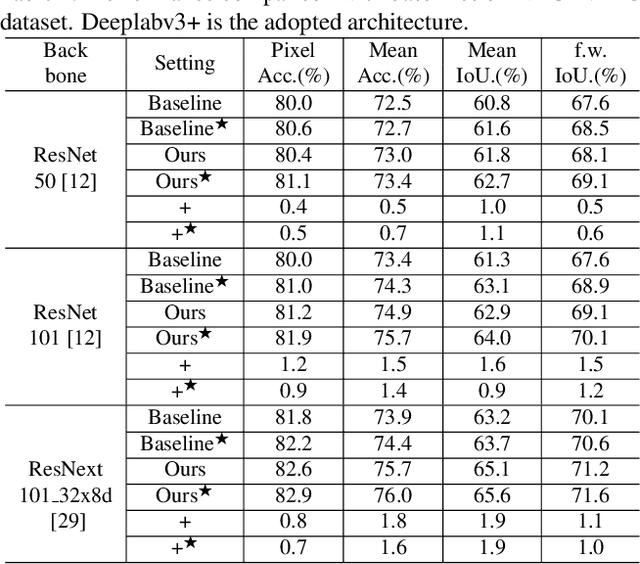
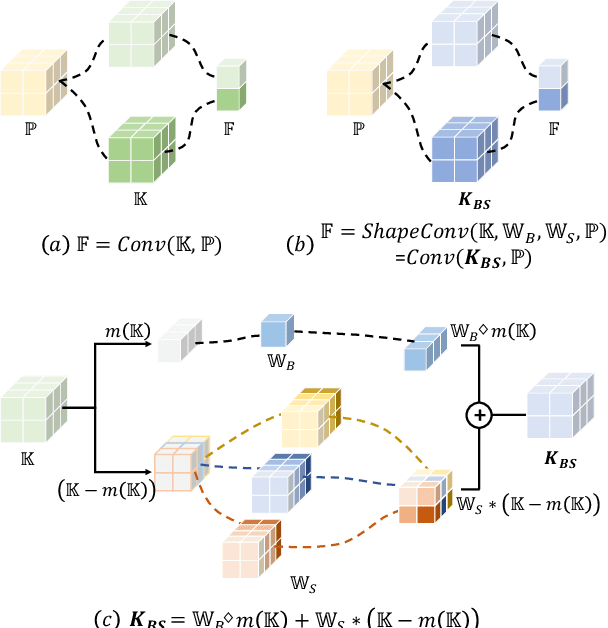
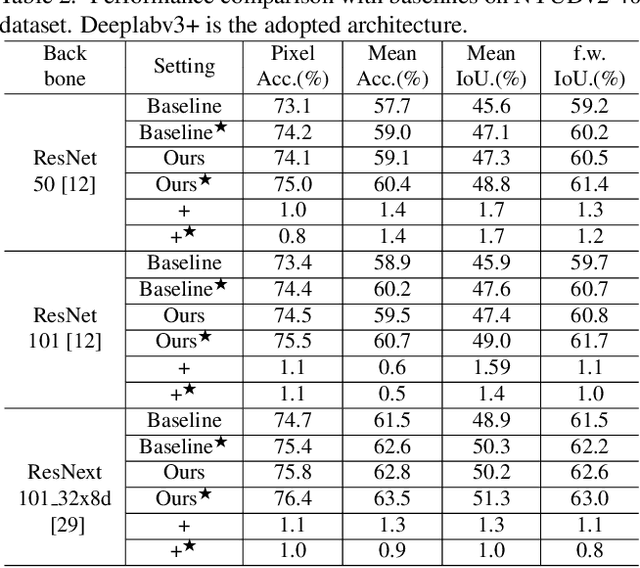
RGB-D semantic segmentation has attracted increasing attention over the past few years. Existing methods mostly employ homogeneous convolution operators to consume the RGB and depth features, ignoring their intrinsic differences. In fact, the RGB values capture the photometric appearance properties in the projected image space, while the depth feature encodes both the shape of a local geometry as well as the base (whereabout) of it in a larger context. Compared with the base, the shape probably is more inherent and has a stronger connection to the semantics, and thus is more critical for segmentation accuracy. Inspired by this observation, we introduce a Shape-aware Convolutional layer (ShapeConv) for processing the depth feature, where the depth feature is firstly decomposed into a shape-component and a base-component, next two learnable weights are introduced to cooperate with them independently, and finally a convolution is applied on the re-weighted combination of these two components. ShapeConv is model-agnostic and can be easily integrated into most CNNs to replace vanilla convolutional layers for semantic segmentation. Extensive experiments on three challenging indoor RGB-D semantic segmentation benchmarks, i.e., NYU-Dv2(-13,-40), SUN RGB-D, and SID, demonstrate the effectiveness of our ShapeConv when employing it over five popular architectures. Moreover, the performance of CNNs with ShapeConv is boosted without introducing any computation and memory increase in the inference phase. The reason is that the learnt weights for balancing the importance between the shape and base components in ShapeConv become constants in the inference phase, and thus can be fused into the following convolution, resulting in a network that is identical to one with vanilla convolutional layers.