 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Monocular Depth from Events via Egomotion Compensation
Dec 26, 2024Event cameras are neuromorphically inspired sensors that sparsely and asynchronously report brightness changes. Their unique characteristics of high temporal resolution, high dynamic range, and low power consumption make them well-suited for addressing challenges in monocular depth estimation (e.g., high-speed or low-lighting conditions). However, current existing methods primarily treat event streams as black-box learning systems without incorporating prior physical principles, thus becoming over-parameterized and failing to fully exploit the rich temporal information inherent in event camera data. To address this limitation, we incorporate physical motion principles to propose an interpretable monocular depth estimation framework, where the likelihood of various depth hypotheses is explicitly determined by the effect of motion compensation. To achieve this, we propose a Focus Cost Discrimination (FCD) module that measures the clarity of edges as an essential indicator of focus level and integrates spatial surroundings to facilitate cost estimation. Furthermore, we analyze the noise patterns within our framework and improve it with the newly introduced Inter-Hypotheses Cost Aggregation (IHCA) module, where the cost volume is refined through cost trend prediction and multi-scale cost consistency constraints. Extensive experiments on real-world and synthetic datasets demonstrate that our proposed framework outperforms cutting-edge methods by up to 10\% in terms of the absolute relative error metric, revealing superior performance in predicting accuracy.
Accurate and Real-time Pseudo Lidar Detection: Is Stereo Neural Network Really Necessary?
Jun 28, 2022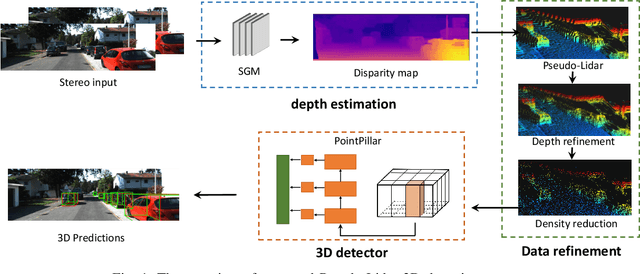
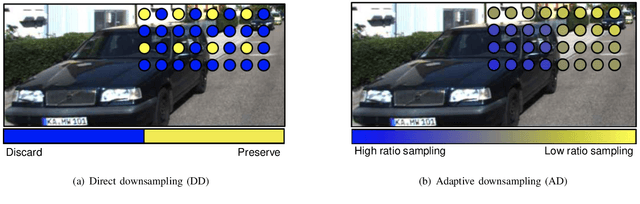
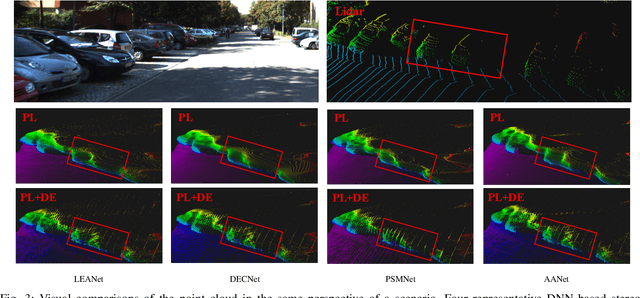
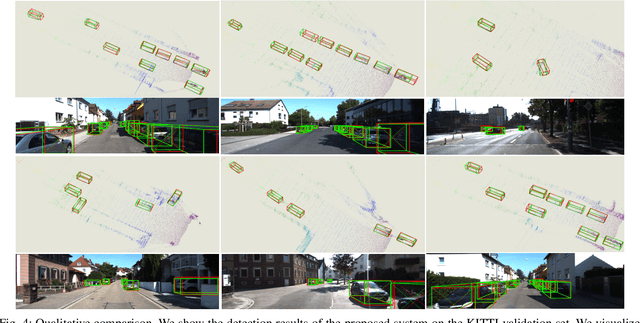
The proposal of Pseudo-Lidar representation has significantly narrowed the gap between visual-based and active Lidar-based 3D object detection. However, current researches exclusively focus on pushing the accuracy improvement of Pseudo-Lidar by taking the advantage of complex and time-consuming neural networks. Seldom explore the profound characteristics of Pseudo-Lidar representation to obtain the promoting opportunities. In this paper, we dive deep into the pseudo Lidar representation and argue that the performance of 3D object detection is not fully dependent on the high precision stereo depth estimation. We demonstrate that even for the unreliable depth estimation, with proper data processing and refining, it can achieve comparable 3D object detection accuracy. With this finding, we further show the possibility that utilizing fast but inaccurate stereo matching algorithms in the Pseudo-Lidar system to achieve low latency responsiveness. In the experiments, we develop a system with a less powerful stereo matching predictor and adopt the proposed refinement schemes to improve the accuracy. The evaluation on the KITTI benchmark shows that the presented system achieves competitive accuracy to the state-of-the-art approaches with only 23 ms computing, showing it is a suitable candidate for deploying to real car-hold applications.
PhoneBit: Efficient GPU-Accelerated Binary Neural Network Inference Engine for Mobile Phones
Dec 05, 2019
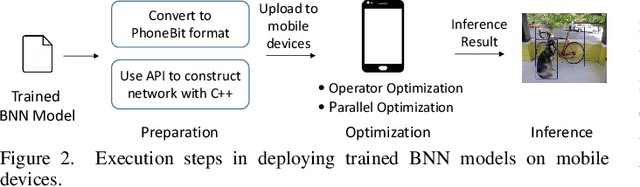
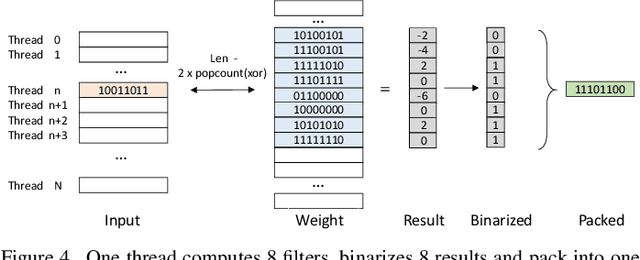

Over the last years, a great success of deep neural networks (DNNs) has been witnessed in computer vision and other fields. However, performance and power constraints make it still challenging to deploy DNNs on mobile devices due to their high computational complexity. Binary neural networks (BNNs) have been demonstrated as a promising solution to achieve this goal by using bit-wise operations to replace most arithmetic operations. Currently, existing GPU-accelerated implementations of BNNs are only tailored for desktop platforms. Due to architecture differences, mere porting of such implementations to mobile devices yields suboptimal performance or is impossible in some cases. In this paper, we propose PhoneBit, a GPU-accelerated BNN inference engine for Android-based mobile devices that fully exploits the computing power of BNNs on mobile GPUs. PhoneBit provides a set of operator-level optimizations including locality-friendly data layout, bit packing with vectorization and layers integration for efficient binary convolution. We also provide a detailed implementation and parallelization optimization for PhoneBit to optimally utilize the memory bandwidth and computing power of mobile GPUs. We evaluate PhoneBit with AlexNet, YOLOv2 Tiny and VGG16 with their binary version. Our experiment results show that PhoneBit can achieve significant speedup and energy efficiency compared with state-of-the-art frameworks for mobile devices.