 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePocketGS: On-Device Training of 3D Gaussian Splatting for High Perceptual Modeling
Jan 24, 2026Efficient and high-fidelity 3D scene modeling is a long-standing pursuit in computer graphics. While recent 3D Gaussian Splatting (3DGS) methods achieve impressive real-time modeling performance, they rely on resource-unconstrained training assumptions that fail on mobile devices, which are limited by minute-scale training budgets and hardware-available peak-memory. We present PocketGS, a mobile scene modeling paradigm that enables on-device 3DGS training under these tightly coupled constraints while preserving high perceptual fidelity. Our method resolves the fundamental contradictions of standard 3DGS through three co-designed operators: G builds geometry-faithful point-cloud priors; I injects local surface statistics to seed anisotropic Gaussians, thereby reducing early conditioning gaps; and T unrolls alpha compositing with cached intermediates and index-mapped gradient scattering for stable mobile backpropagation. Collectively, these operators satisfy the competing requirements of training efficiency, memory compactness, and modeling fidelity. Extensive experiments demonstrate that PocketGS is able to outperform the powerful mainstream workstation 3DGS baseline to deliver high-quality reconstructions, enabling a fully on-device, practical capture-to-rendering workflow.
Mini-Splatting2: Building 360 Scenes within Minutes via Aggressive Gaussian Densification
Nov 19, 2024



In this study, we explore the essential challenge of fast scene optimization for Gaussian Splatting. Through a thorough analysis of the geometry modeling process, we reveal that dense point clouds can be effectively reconstructed early in optimization through Gaussian representations. This insight leads to our approach of aggressive Gaussian densification, which provides a more efficient alternative to conventional progressive densification methods. By significantly increasing the number of critical Gaussians, we enhance the model capacity to capture dense scene geometry at the early stage of optimization. This strategy is seamlessly integrated into the Mini-Splatting densification and simplification framework, enabling rapid convergence without compromising quality. Additionally, we introduce visibility culling within Gaussian Splatting, leveraging per-view Gaussian importance as precomputed visibility to accelerate the optimization process. Our Mini-Splatting2 achieves a balanced trade-off among optimization time, the number of Gaussians, and rendering quality, establishing a strong baseline for future Gaussian-Splatting-based works. Our work sets the stage for more efficient, high-quality 3D scene modeling in real-world applications, and the code will be made available no matter acceptance.
Mini-Splatting: Representing Scenes with a Constrained Number of Gaussians
Mar 21, 2024In this study, we explore the challenge of efficiently representing scenes with a constrained number of Gaussians. Our analysis shifts from traditional graphics and 2D computer vision to the perspective of point clouds, highlighting the inefficient spatial distribution of Gaussian representation as a key limitation in model performance. To address this, we introduce strategies for densification including blur split and depth reinitialization, and simplification through Gaussian binarization and sampling. These techniques reorganize the spatial positions of the Gaussians, resulting in significant improvements across various datasets and benchmarks in terms of rendering quality, resource consumption, and storage compression. Our proposed Mini-Splatting method integrates seamlessly with the original rasterization pipeline, providing a strong baseline for future research in Gaussian-Splatting-based works.
4DAC: Learning Attribute Compression for Dynamic Point Clouds
Apr 25, 2022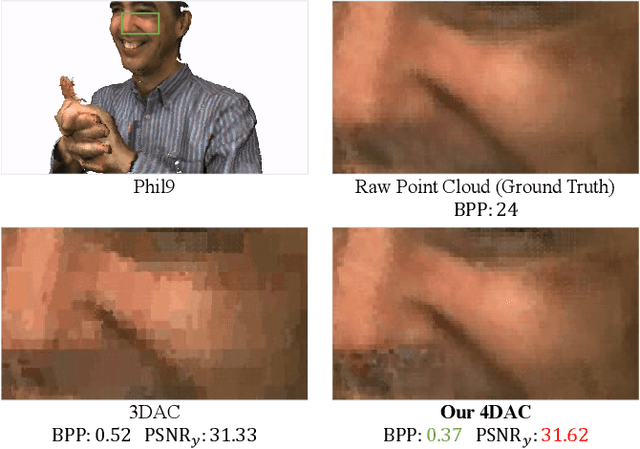
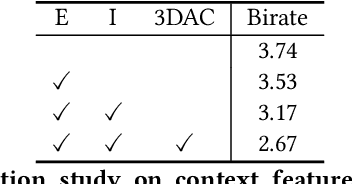
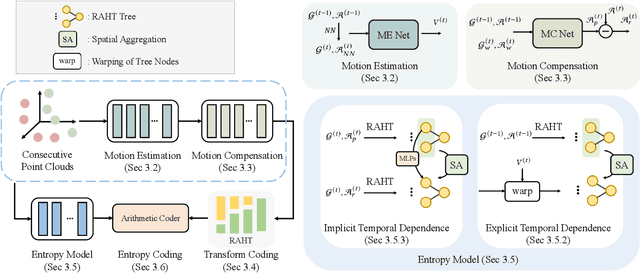
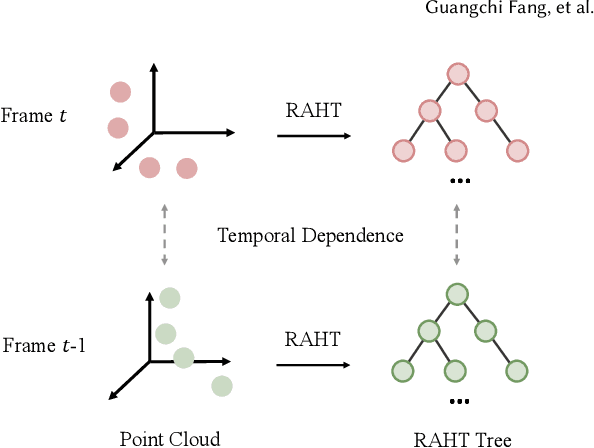
With the development of the 3D data acquisition facilities, the increasing scale of acquired 3D point clouds poses a challenge to the existing data compression techniques. Although promising performance has been achieved in static point cloud compression, it remains under-explored and challenging to leverage temporal correlations within a point cloud sequence for effective dynamic point cloud compression. In this paper, we study the attribute (e.g., color) compression of dynamic point clouds and present a learning-based framework, termed 4DAC. To reduce temporal redundancy within data, we first build the 3D motion estimation and motion compensation modules with deep neural networks. Then, the attribute residuals produced by the motion compensation component are encoded by the region adaptive hierarchical transform into residual coefficients. In addition, we also propose a deep conditional entropy model to estimate the probability distribution of the transformed coefficients, by incorporating temporal context from consecutive point clouds and the motion estimation/compensation modules. Finally, the data stream is losslessly entropy coded with the predicted distribution. Extensive experiments on several public datasets demonstrate the superior compression performance of the proposed approach.
3DAC: Learning Attribute Compression for Point Clouds
Mar 17, 2022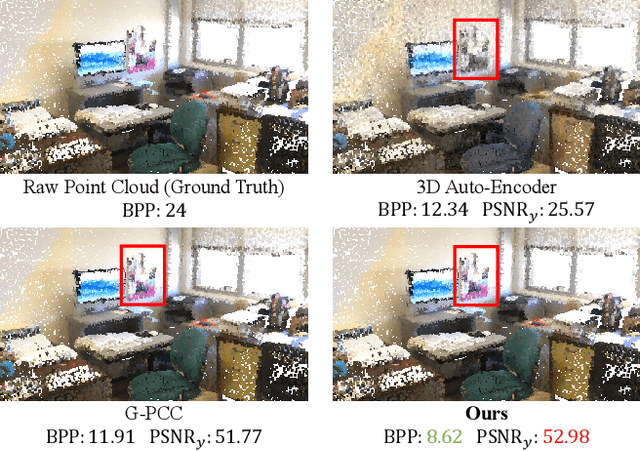
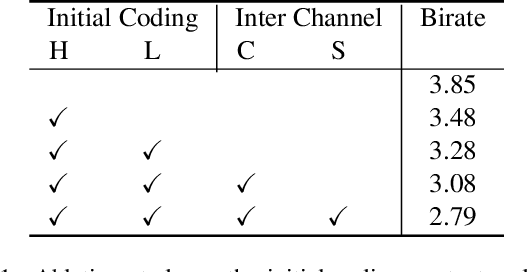
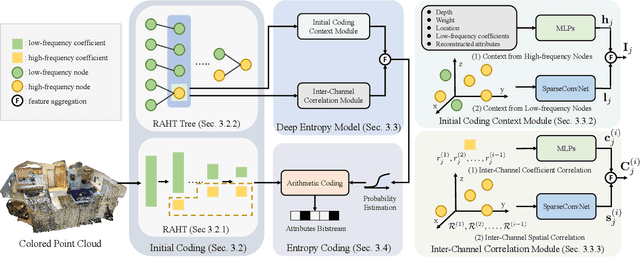
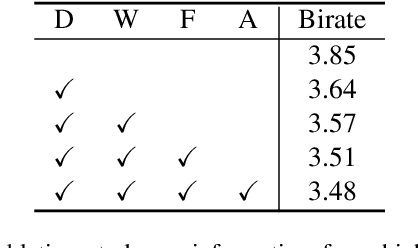
We study the problem of attribute compression for large-scale unstructured 3D point clouds. Through an in-depth exploration of the relationships between different encoding steps and different attribute channels, we introduce a deep compression network, termed 3DAC, to explicitly compress the attributes of 3D point clouds and reduce storage usage in this paper. Specifically, the point cloud attributes such as color and reflectance are firstly converted to transform coefficients. We then propose a deep entropy model to model the probabilities of these coefficients by considering information hidden in attribute transforms and previous encoded attributes. Finally, the estimated probabilities are used to further compress these transform coefficients to a final attributes bitstream. Extensive experiments conducted on both indoor and outdoor large-scale open point cloud datasets, including ScanNet and SemanticKITTI, demonstrated the superior compression rates and reconstruction quality of the proposed 3DAC.
SQN: Weakly-Supervised Semantic Segmentation of Large-Scale 3D Point Clouds with 1000x Fewer Labels
Apr 11, 2021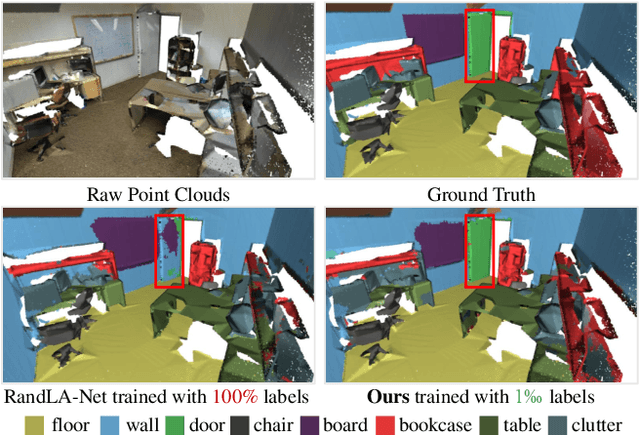
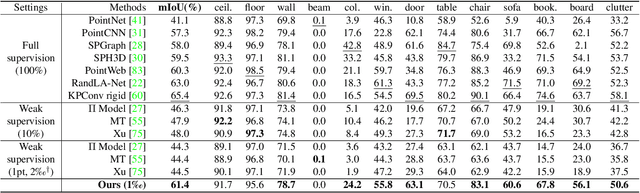
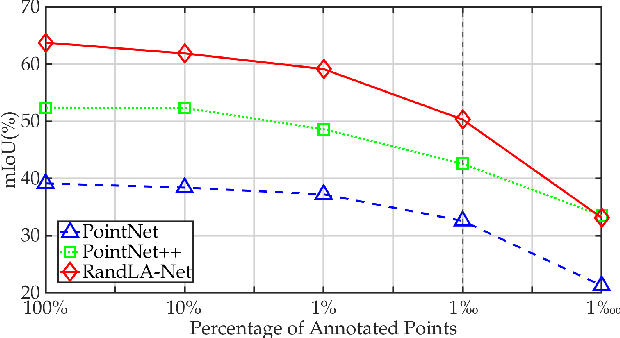
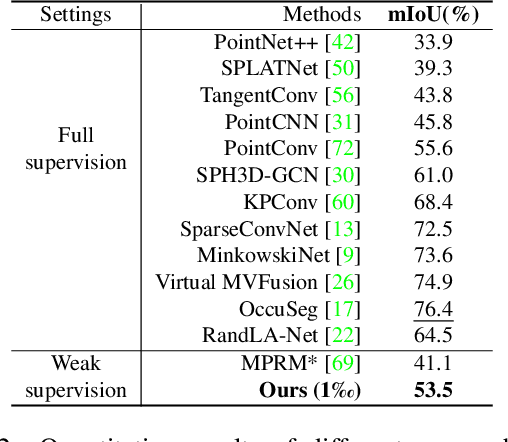
We study the problem of labelling effort for semantic segmentation of large-scale 3D point clouds. Existing works usually rely on densely annotated point-level semantic labels to provide supervision for network training. However, in real-world scenarios that contain billions of points, it is impractical and extremely costly to manually annotate every single point. In this paper, we first investigate whether dense 3D labels are truly required for learning meaningful semantic representations. Interestingly, we find that the segmentation performance of existing works only drops slightly given as few as 1% of the annotations. However, beyond this point (e.g. 1 per thousand and below) existing techniques fail catastrophically. To this end, we propose a new weak supervision method to implicitly augment the total amount of available supervision signals, by leveraging the semantic similarity between neighboring points. Extensive experiments demonstrate that the proposed Semantic Query Network (SQN) achieves state-of-the-art performance on six large-scale open datasets under weak supervision schemes, while requiring only 1000x fewer labeled points for training. The code is available at https://github.com/QingyongHu/SQN.