 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Classifier Training on Synthetic Data for Cross-Domain Datasets
Oct 30, 2024A major challenges of deep learning (DL) is the necessity to collect huge amounts of training data. Often, the lack of a sufficiently large dataset discourages the use of DL in certain applications. Typically, acquiring the required amounts of data costs considerable time, material and effort. To mitigate this problem, the use of synthetic images combined with real data is a popular approach, widely adopted in the scientific community to effectively train various detectors. In this study, we examined the potential of synthetic data-based training in the field of intelligent transportation systems. Our focus is on camera-based traffic sign recognition applications for advanced driver assistance systems and autonomous driving. The proposed augmentation pipeline of synthetic datasets includes novel augmentation processes such as structured shadows and gaussian specular highlights. A well-known DL model was trained with different datasets to compare the performance of synthetic and real image-based trained models. Additionally, a new, detailed method to objectively compare these models is proposed. Synthetic images are generated using a semi-supervised errors-guide method which is also described. Our experiments showed that a synthetic image-based approach outperforms in most cases real image-based training when applied to cross-domain test datasets (+10% precision for GTSRB dataset) and consequently, the generalization of the model is improved decreasing the cost of acquiring images.
* 10 pages
Synthetic outlier generation for anomaly detection in autonomous driving
Aug 04, 2023



Anomaly detection, or outlier detection, is a crucial task in various domains to identify instances that significantly deviate from established patterns or the majority of data. In the context of autonomous driving, the identification of anomalies is particularly important to prevent safety-critical incidents, as deep learning models often exhibit overconfidence in anomalous or outlier samples. In this study, we explore different strategies for training an image semantic segmentation model with an anomaly detection module. By introducing modifications to the training stage of the state-of-the-art DenseHybrid model, we achieve significant performance improvements in anomaly detection. Moreover, we propose a simplified detector that achieves comparable results to our modified DenseHybrid approach, while also surpassing the performance of the original DenseHybrid model. These findings demonstrate the efficacy of our proposed strategies for enhancing anomaly detection in the context of autonomous driving.
Adaptive QoS of WebRTC for Vehicular Media Communications
Aug 24, 2022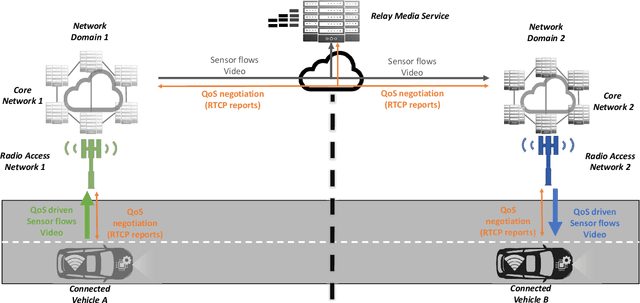
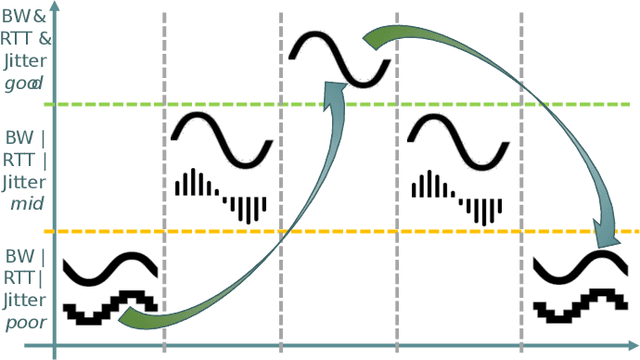
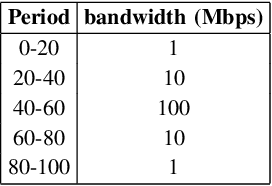
Vehicles shipping sensors for onboard systems are gaining connectivity. This enables information sharing to realize a more comprehensive understanding of the environment. However, peer communication through public cellular networks brings multiple networking hurdles to address, needing in-network systems to relay communications and connect parties that cannot connect directly. Web Real-Time Communication (WebRTC) is a good candidate for media streaming across vehicles as it enables low latency communications, while bringing standard protocols to security handshake, discovering public IPs and transverse Network Address Translation (NAT) systems. However, the end-to-end Quality of Service (QoS) adaptation in an infrastructure where transmission and reception are decoupled by a relay, needs a mechanism to adapt the video stream to the network capacity efficiently. To this end, this paper investigates a mechanism to apply changes on resolution, framerate and bitrate by exploiting the Real Time Transport Control Protocol (RTCP) metrics, such as bandwidth and round-trip time. The solution aims to ensure that the receiving onboard system gets relevant information in time. The impact on end-to-end throughput efficiency and reaction time when applying different approaches to QoS adaptation are analyzed in a real 5G testbed.
Monetisation of and Access to in-Vehicle data and resources: the 5GMETA approach
Aug 24, 2022
Today's vehicles are increasingly embedded with computers and sensors which produce huge amount of data. The data are exploited for internal purposes and with the development of connected infrastructures and smart cities, the vehicles interact with each other as well as with road users generating other types of data. The access to these data and in-vehicle resources and their monetisation faces many challenges which are presented in this paper. Furthermore, the most important commercial solution compared to the open and novel approach faced in the H2020 5GMETA project.
5G Features and Standards for Vehicle Data Exploitation
Apr 13, 2022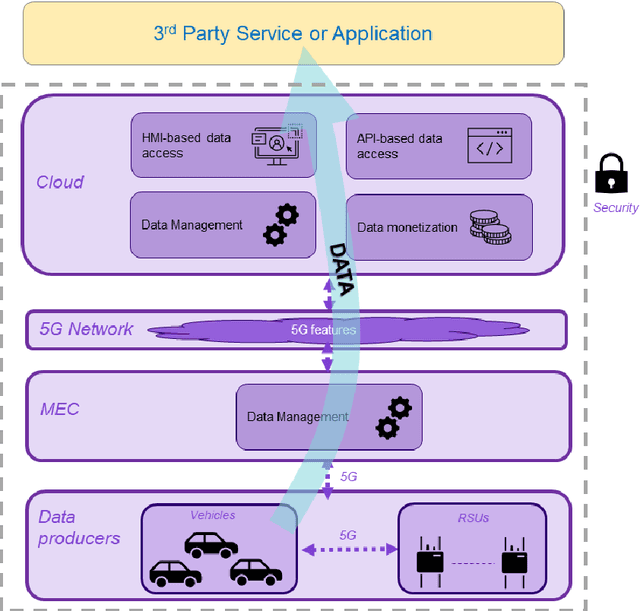
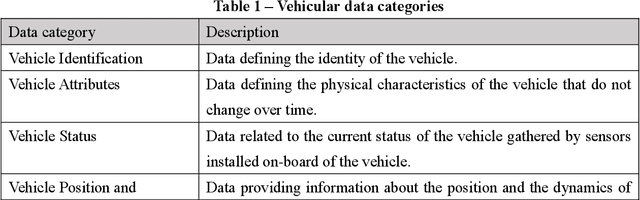

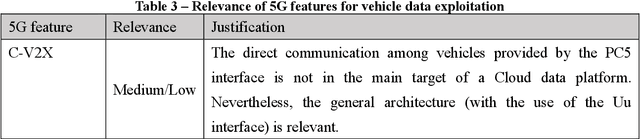
Cars capture and generate huge volumes of data in real-time about the driving dynamics, the environment, and the driver and passengers' activities. Due to the proliferation of cooperative, connected and automated mobility (CCAM), the value of data from vehicles is getting strategic, not just for the automotive industry, but also for many diverse stakeholders including small and medium-sized enterprises (SMEs) and start-ups. 5G can enable car-captured data to feed innovative applications and services deployed in the cloud ensuring lower latency and higher throughput than previous cellular technologies. This paper identifies and discusses the relevance of the main 5G features that can contribute to a scalable, flexible, reliable and secure data pipeline, pointing to the standards and technical reports that specify their implementation.
Embedded Platforms for Computer Vision-based Advanced Driver Assistance Systems: a Survey
Apr 28, 2015Computer Vision, either alone or combined with other technologies such as radar or Lidar, is one of the key technologies used in Advanced Driver Assistance Systems (ADAS). Its role understanding and analysing the driving scene is of great importance as it can be noted by the number of ADAS applications that use this technology. However, porting a vision algorithm to an embedded automotive system is still very challenging, as there must be a trade-off between several design requisites. Furthermore, there is not a standard implementation platform, so different alternatives have been proposed by both the scientific community and the industry. This paper aims to review the requisites and the different embedded implementation platforms that can be used for Computer Vision-based ADAS, with a critical analysis and an outlook to future trends.