 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic outlier generation for anomaly detection in autonomous driving
Aug 04, 2023



Anomaly detection, or outlier detection, is a crucial task in various domains to identify instances that significantly deviate from established patterns or the majority of data. In the context of autonomous driving, the identification of anomalies is particularly important to prevent safety-critical incidents, as deep learning models often exhibit overconfidence in anomalous or outlier samples. In this study, we explore different strategies for training an image semantic segmentation model with an anomaly detection module. By introducing modifications to the training stage of the state-of-the-art DenseHybrid model, we achieve significant performance improvements in anomaly detection. Moreover, we propose a simplified detector that achieves comparable results to our modified DenseHybrid approach, while also surpassing the performance of the original DenseHybrid model. These findings demonstrate the efficacy of our proposed strategies for enhancing anomaly detection in the context of autonomous driving.
dbcsp: User-friendly R package for Distance-Based Common Spacial Patterns
Sep 02, 2021
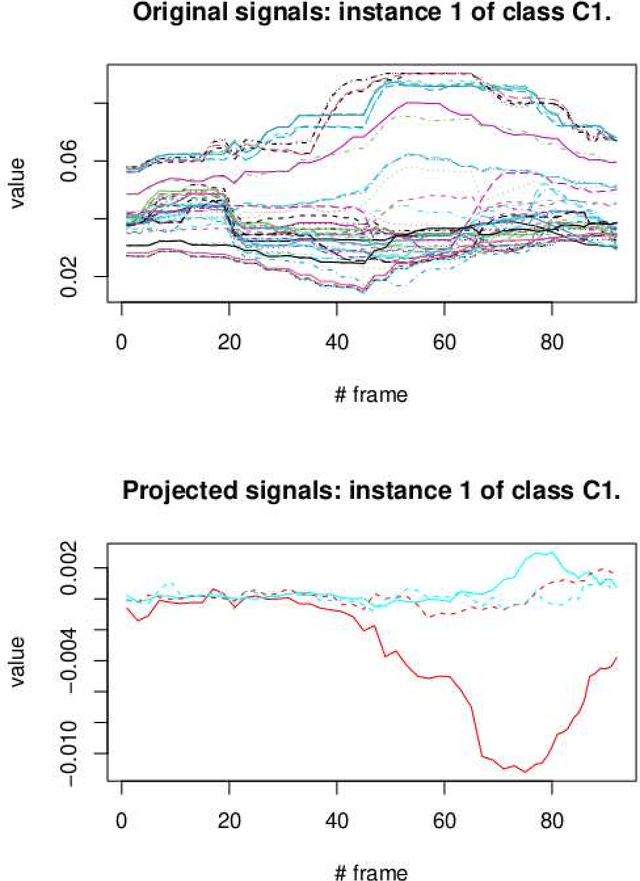
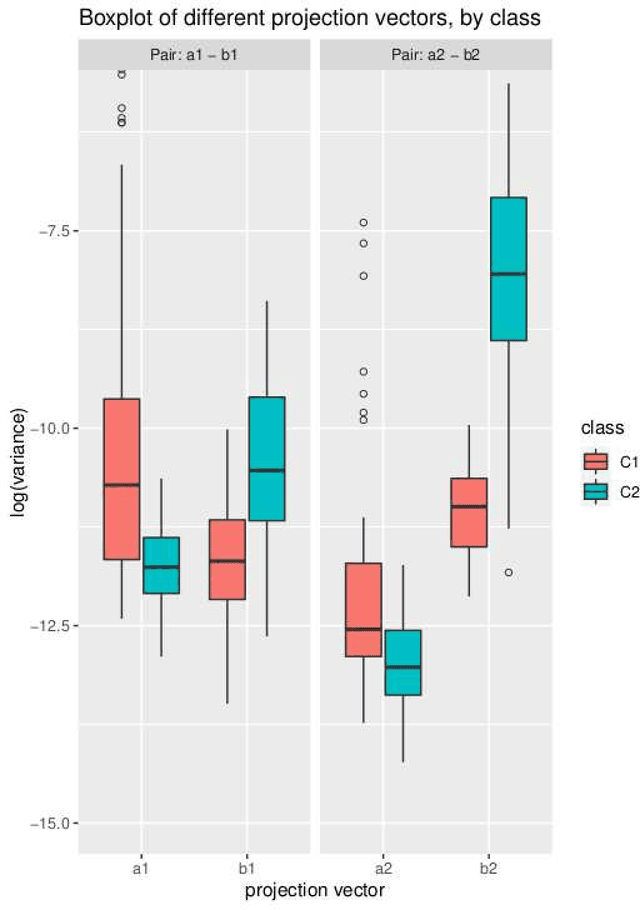
Common Spacial Patterns (CSP) is a widely used method to analyse electroencephalography (EEG) data, concerning the supervised classification of brain's activity. More generally, it can be useful to distinguish between multivariate signals recorded during a time span for two different classes. CSP is based on the simultaneous diagonalization of the average covariance matrices of signals from both classes and it allows to project the data into a low-dimensional subspace. Once data are represented in a low-dimensional subspace, a classification step must be carried out. The original CSP method is based on the Euclidean distance between signals and here, we extend it so that it can be applied on any appropriate distance for data at hand. Both, the classical CSP and the new Distance-Based CSP (DB-CSP) are implemented in an R package, called dbcsp.
Quantitative analysis of robot gesticulation behavior
Oct 22, 2020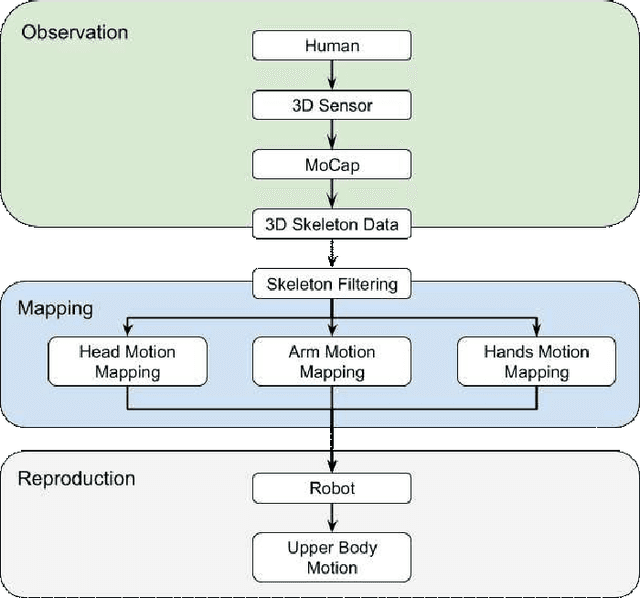
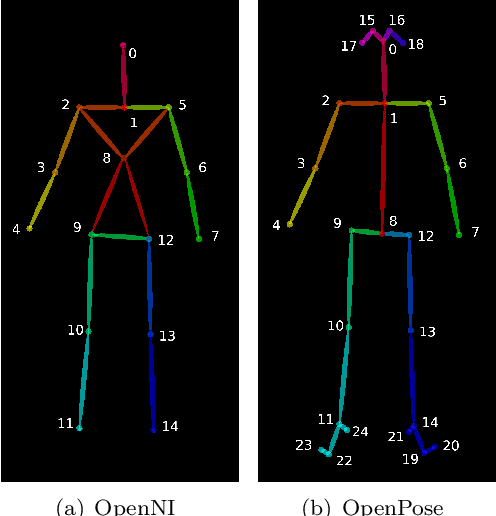
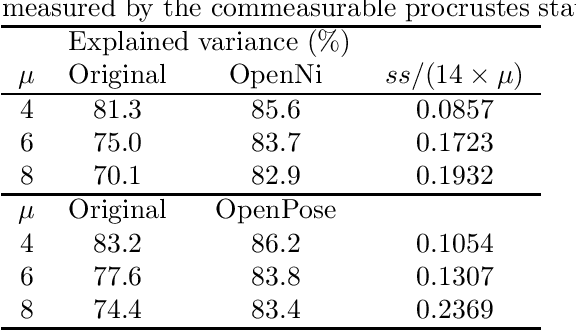
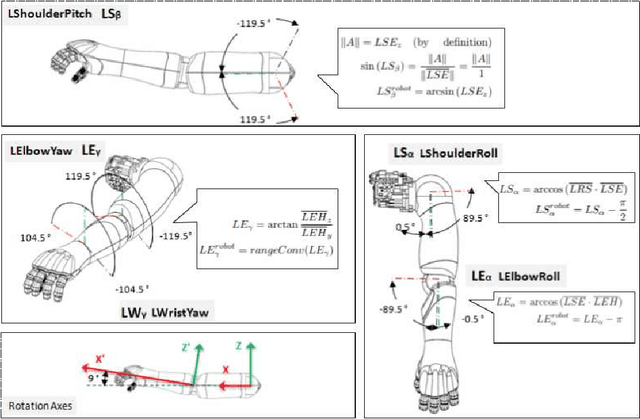
Social robot capabilities, such as talking gestures, are best produced using data driven approaches to avoid being repetitive and to show trustworthiness. However, there is a lack of robust quantitative methods that allow to compare such methods beyond visual evaluation. In this paper a quantitative analysis is performed that compares two Generative Adversarial Networks based gesture generation approaches. The aim is to measure characteristics such as fidelity to the original training data, but at the same time keep track of the degree of originality of the produced gestures. Principal Coordinate Analysis and procrustes statistics are performed and a new Fr\'echet Gesture Distance is proposed by adapting the Fr\'echet Inception Distance to gestures. These three techniques are taken together to asses the fidelity/originality of the generated gestures.