 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Risk Assessment Methodology with an LDM-based System for Parking Scenarios
Apr 05, 2024This paper describes the methodology for building a dynamic risk assessment for ADAS (Advanced Driving Assistance Systems) algorithms in parking scenarios, fusing exterior and interior perception for a better understanding of the scene and a more comprehensive risk estimation. This includes the definition of a dynamic risk methodology that depends on the situation from inside and outside the vehicle, the creation of a multi-sensor dataset of risk assessment for ADAS benchmarking purposes, and a Local Dynamic Map (LDM) that fuses data from the exterior and interior of the car to build an LDM-based Dynamic Risk Assessment System (DRAS).
LiDAR-based curb detection for ground truth annotation in automated driving validation
Dec 01, 2023



Curb detection is essential for environmental awareness in Automated Driving (AD), as it typically limits drivable and non-drivable areas. Annotated data are necessary for developing and validating an AD function. However, the number of public datasets with annotated point cloud curbs is scarce. This paper presents a method for detecting 3D curbs in a sequence of point clouds captured from a LiDAR sensor, which consists of two main steps. First, our approach detects the curbs at each scan using a segmentation deep neural network. Then, a sequence-level processing step estimates the 3D curbs in the reconstructed point cloud using the odometry of the vehicle. From these 3D points of the curb, we obtain polylines structured following ASAM OpenLABEL standard. These detections can be used as pre-annotations in labelling pipelines to efficiently generate curb-related ground truth data. We validate our approach through an experiment in which different human annotators were required to annotate curbs in a group of LiDAR-based sequences with and without our automatically generated pre-annotations. The results show that the manual annotation time is reduced by 50.99% thanks to our detections, keeping the data quality level.
Adaptive QoS of WebRTC for Vehicular Media Communications
Aug 24, 2022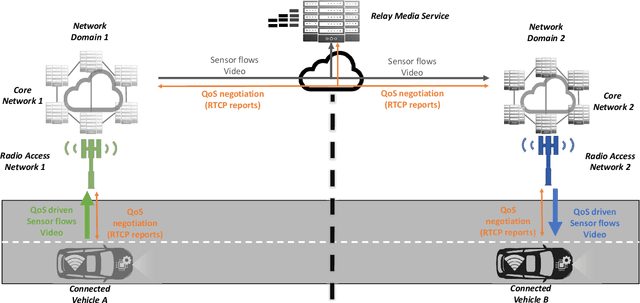
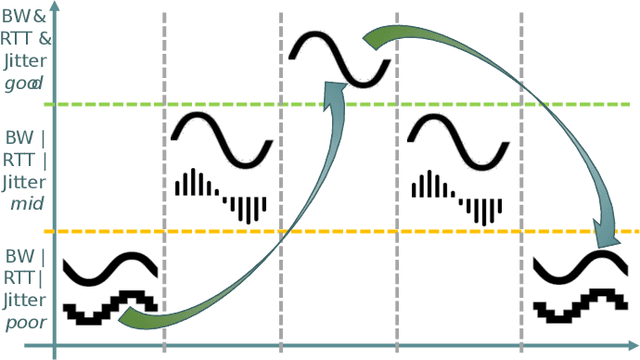
Vehicles shipping sensors for onboard systems are gaining connectivity. This enables information sharing to realize a more comprehensive understanding of the environment. However, peer communication through public cellular networks brings multiple networking hurdles to address, needing in-network systems to relay communications and connect parties that cannot connect directly. Web Real-Time Communication (WebRTC) is a good candidate for media streaming across vehicles as it enables low latency communications, while bringing standard protocols to security handshake, discovering public IPs and transverse Network Address Translation (NAT) systems. However, the end-to-end Quality of Service (QoS) adaptation in an infrastructure where transmission and reception are decoupled by a relay, needs a mechanism to adapt the video stream to the network capacity efficiently. To this end, this paper investigates a mechanism to apply changes on resolution, framerate and bitrate by exploiting the Real Time Transport Control Protocol (RTCP) metrics, such as bandwidth and round-trip time. The solution aims to ensure that the receiving onboard system gets relevant information in time. The impact on end-to-end throughput efficiency and reaction time when applying different approaches to QoS adaptation are analyzed in a real 5G testbed.