 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Visual Place Recognition via Fast and Slow Adaptive Biasing in Event Cameras
Mar 25, 2024



Event cameras are increasingly popular in robotics due to their beneficial features, such as low latency, energy efficiency, and high dynamic range. Nevertheless, their downstream task performance is greatly influenced by the optimization of bias parameters. These parameters, for instance, regulate the necessary change in light intensity to trigger an event, which in turn depends on factors such as the environment lighting and camera motion. This paper introduces feedback control algorithms that automatically tune the bias parameters through two interacting methods: 1) An immediate, on-the-fly fast adaptation of the refractory period, which sets the minimum interval between consecutive events, and 2) if the event rate exceeds the specified bounds even after changing the refractory period repeatedly, the controller adapts the pixel bandwidth and event thresholds, which stabilizes after a short period of noise events across all pixels (slow adaptation). Our evaluation focuses on the visual place recognition task, where incoming query images are compared to a given reference database. We conducted comprehensive evaluations of our algorithms' adaptive feedback control in real-time. To do so, we collected the QCR-Fast-and-Slow dataset that contains DAVIS346 event camera streams from 366 repeated traversals of a Scout Mini robot navigating through a 100 meter long indoor lab setting (totaling over 35km distance traveled) in varying brightness conditions with ground truth location information. Our proposed feedback controllers result in superior performance when compared to the standard bias settings and prior feedback control methods. Our findings also detail the impact of bias adjustments on task performance and feature ablation studies on the fast and slow adaptation mechanisms.
BirdSLAM: Monocular Multibody SLAM in Bird's-Eye View
Nov 15, 2020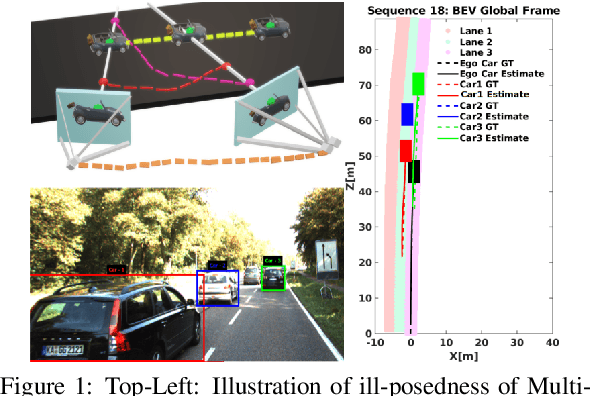
In this paper, we present BirdSLAM, a novel simultaneous localization and mapping (SLAM) system for the challenging scenario of autonomous driving platforms equipped with only a monocular camera. BirdSLAM tackles challenges faced by other monocular SLAM systems (such as scale ambiguity in monocular reconstruction, dynamic object localization, and uncertainty in feature representation) by using an orthographic (bird's-eye) view as the configuration space in which localization and mapping are performed. By assuming only the height of the ego-camera above the ground, BirdSLAM leverages single-view metrology cues to accurately localize the ego-vehicle and all other traffic participants in bird's-eye view. We demonstrate that our system outperforms prior work that uses strictly greater information, and highlight the relevance of each design decision via an ablation analysis.
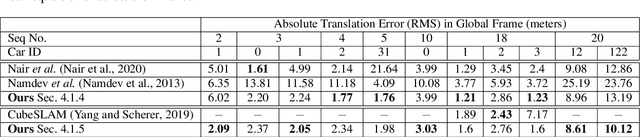
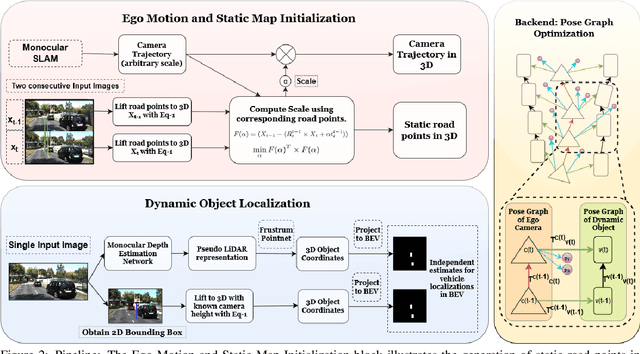
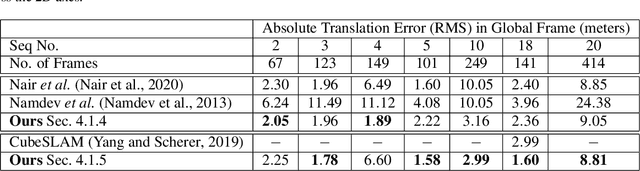
Multi-object Monocular SLAM for Dynamic Environments
Feb 10, 2020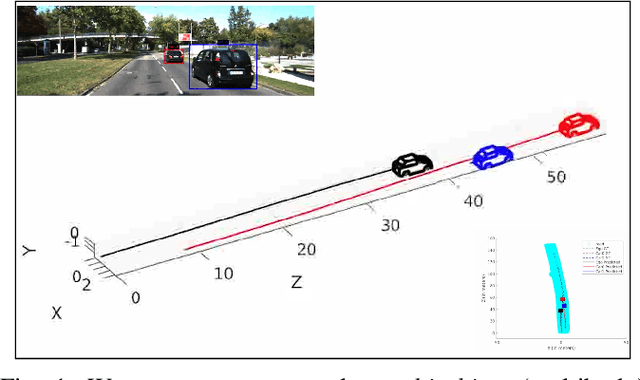
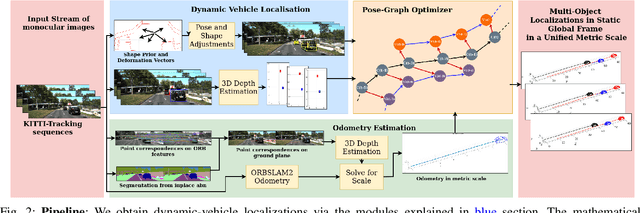
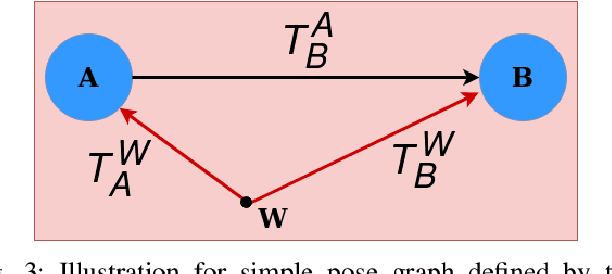
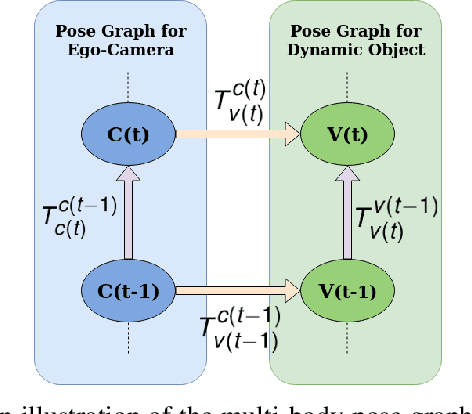
Multibody monocular SLAM in dynamic environments remains a long-standing challenge in terms of perception and state estimation. Although theoretical solutions exist, practice lags behind, predominantly due to the lack of robust perceptual and predictive models of dynamic participants. The quintessential challenge in Multi-body monocular SLAM in dynamic scenes stems from the problem of unobservability as it is not possible to triangulate a moving object from a moving monocular camera. Under restrictions of object motion the problem can be solved, however even here one is entailed to solve for the single family solution to the relative scale problem. The relative scale problem exists since the dynamic objects that get reconstructed with the monocular camera have a different scale vis a vis the scale space in which the stationary scene is reconstructed. We solve this rather intractable problem by reconstructing dynamic vehicles/participants in single view in metric scale through an object SLAM pipeline. Further, we lift the ego vehicle trajectory obtained from Monocular ORB-SLAM also into metric scales making use of ground plane features thereby resolving the relative scale problem. We present a multi pose-graph optimization formulation to estimate the pose and track dynamic objects in the environment. This optimization helps us reduce the average error in trajectories of multiple bodies in KITTI Tracking sequences. To the best of our knowledge, our method is the first practical monocular multi-body SLAM system to perform dynamic multi-object and ego localization in a unified framework in metric scale.