 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Robustness Across Representation Spaces
Dec 01, 2020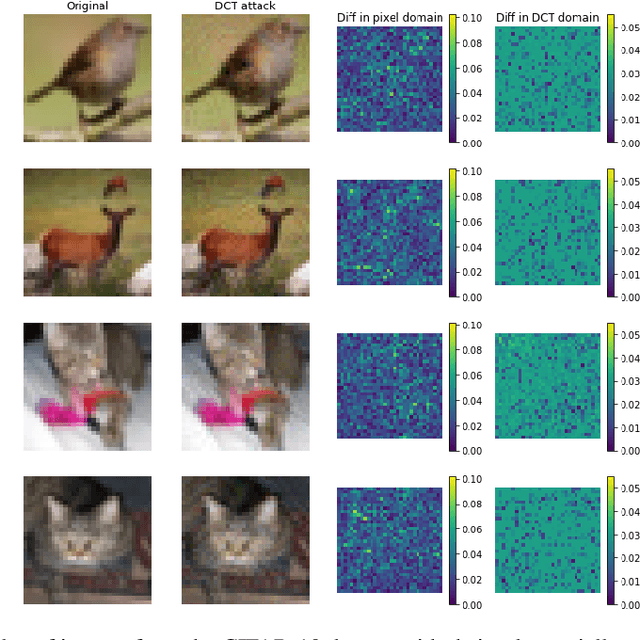
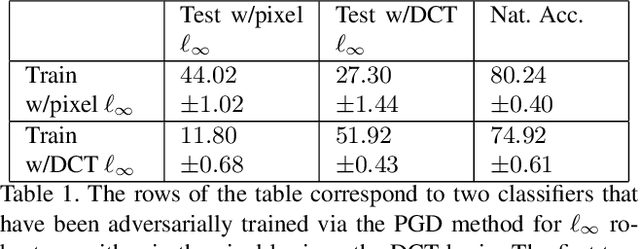
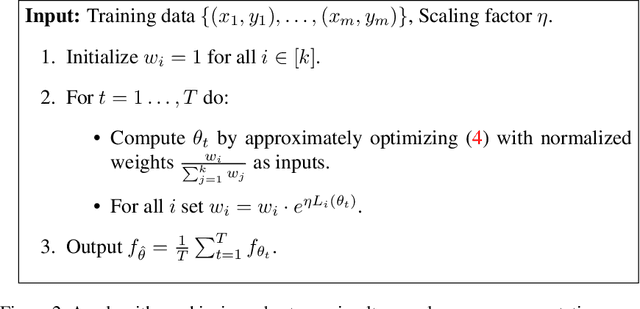
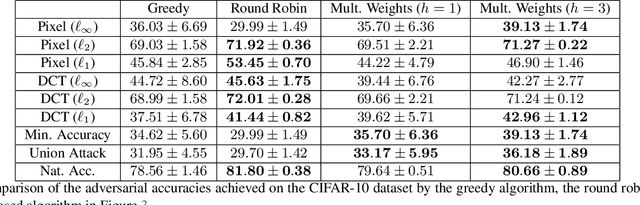
Adversarial robustness corresponds to the susceptibility of deep neural networks to imperceptible perturbations made at test time. In the context of image tasks, many algorithms have been proposed to make neural networks robust to adversarial perturbations made to the input pixels. These perturbations are typically measured in an $\ell_p$ norm. However, robustness often holds only for the specific attack used for training. In this work we extend the above setting to consider the problem of training of deep neural networks that can be made simultaneously robust to perturbations applied in multiple natural representation spaces. For the case of image data, examples include the standard pixel representation as well as the representation in the discrete cosine transform~(DCT) basis. We design a theoretically sound algorithm with formal guarantees for the above problem. Furthermore, our guarantees also hold when the goal is to require robustness with respect to multiple $\ell_p$ norm based attacks. We then derive an efficient practical implementation and demonstrate the effectiveness of our approach on standard datasets for image classification.
Learning Agile Locomotion Skills with a Mentor
Nov 11, 2020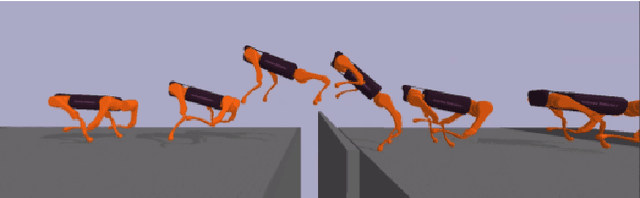
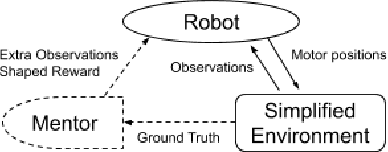
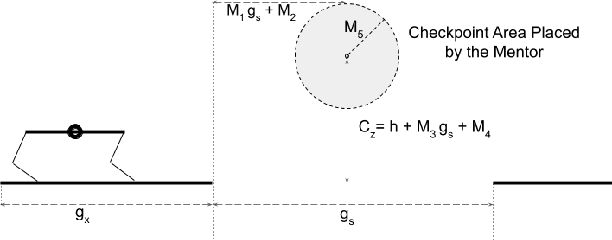
Developing agile behaviors for legged robots remains a challenging problem. While deep reinforcement learning is a promising approach, learning truly agile behaviors typically requires tedious reward shaping and careful curriculum design. We formulate agile locomotion as a multi-stage learning problem in which a mentor guides the agent throughout the training. The mentor is optimized to place a checkpoint to guide the movement of the robot's center of mass while the student (i.e. the robot) learns to reach these checkpoints. Once the student can solve the task, we teach the student to perform the task without the mentor. We evaluate our proposed learning system with a simulated quadruped robot on a course consisting of randomly generated gaps and hurdles. Our method significantly outperforms a single-stage RL baseline without a mentor, and the quadruped robot can agilely run and jump across gaps and obstacles. Finally, we present a detailed analysis of the learned behaviors' feasibility and efficiency.
Zero-Shot Terrain Generalization for Visual Locomotion Policies
Nov 11, 2020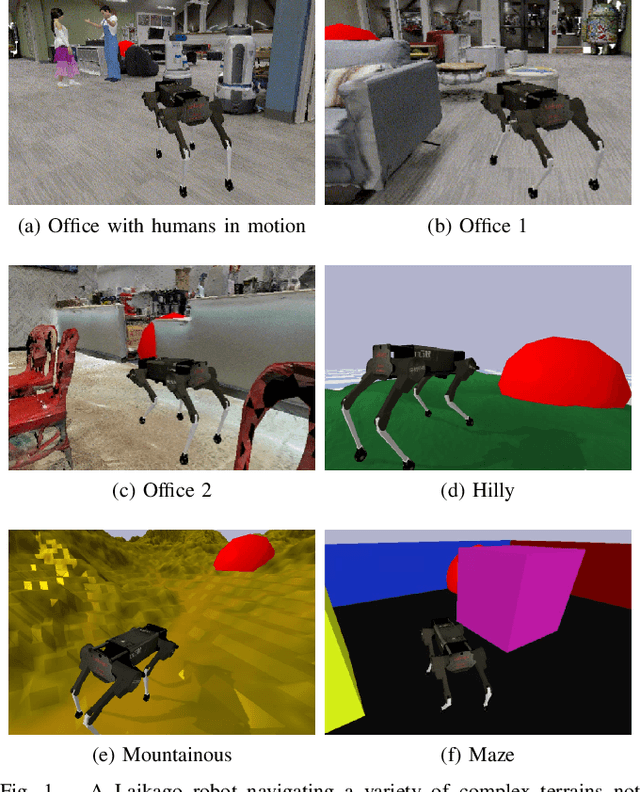
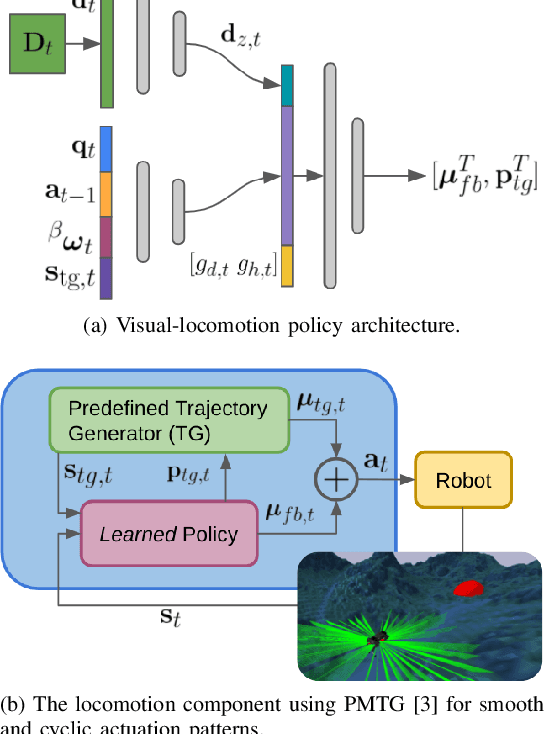
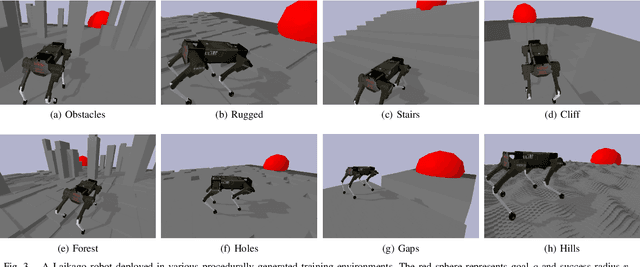
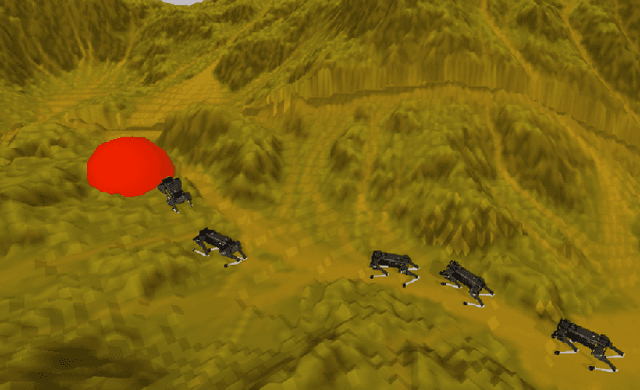
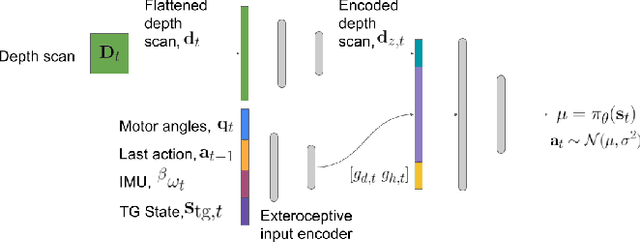
Legged robots have unparalleled mobility on unstructured terrains. However, it remains an open challenge to design locomotion controllers that can operate in a large variety of environments. In this paper, we address this challenge of automatically learning locomotion controllers that can generalize to a diverse collection of terrains often encountered in the real world. We frame this challenge as a multi-task reinforcement learning problem and define each task as a type of terrain that the robot needs to traverse. We propose an end-to-end learning approach that makes direct use of the raw exteroceptive inputs gathered from a simulated 3D LiDAR sensor, thus circumventing the need for ground-truth heightmaps or preprocessing of perception information. As a result, the learned controller demonstrates excellent zero-shot generalization capabilities and can navigate 13 different environments, including stairs, rugged land, cluttered offices, and indoor spaces with humans.