 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimisation of Air-Ground Swarm Teaming for Target Search, using Differential Evolution
Sep 13, 2019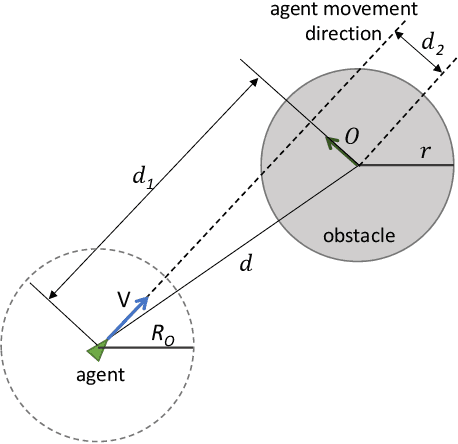
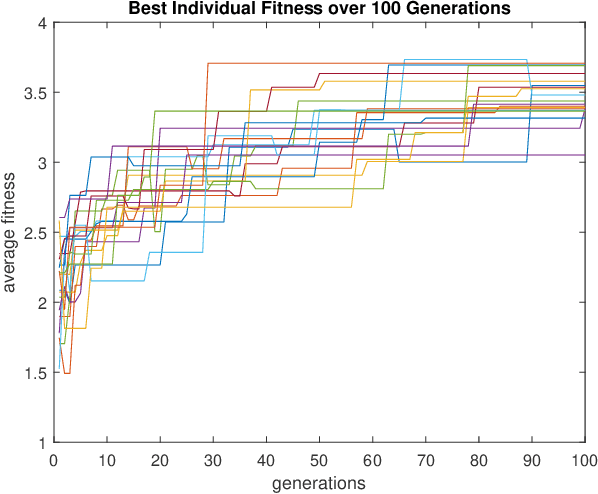
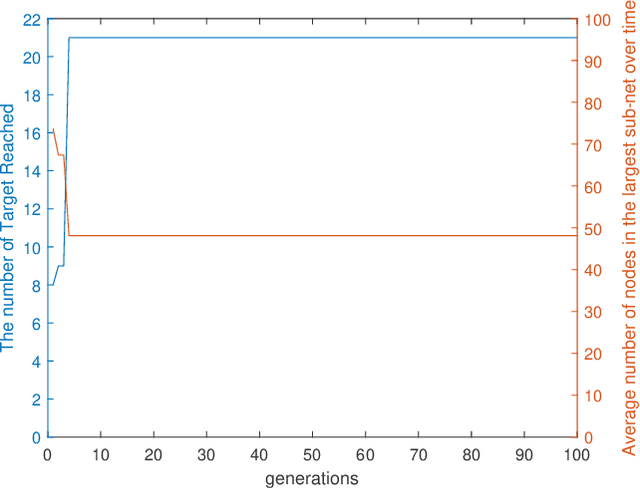
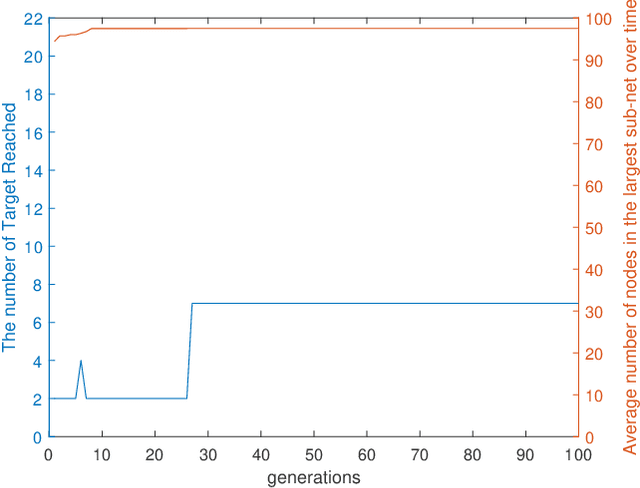
This paper presents a swarm teaming perspective that enhances the scope of classic investigations on survivable networks. A target searching generic context is considered as test-bed, in which a swarm of ground agents and a swarm of UAVs cooperate so that the ground agents reach as many targets as possible in the field while also remaining connected as much as possible at all times. To optimise the system against both these objectives in the same time, we use an evolutionary computation approach in the form of a differential evolution algorithm. Results are encouraging, showing a good evolution of the fitness function used as part of the differential evolution, and a good performance of the evolved dual-swarm system, which exhibits an optimal trade-off between target reaching and connectivity.
On educating machines
Sep 13, 2019Machine education is an emerging research field that focuses on the problem which is inverse to machine learning. To date, the literature on educating machines is still in its infancy. A fairly low number of methodology and method papers are scattered throughout various formal and informal publication avenues, mainly because the field is not yet well coalesced (with no well established discussion forums or investigation pathways), but also due to the breadth of its potential ramifications and research directions. In this study we bring together the existing literature and organise the discussion into a small number of research directions (out of many) which are to date sufficiently explored to form a minimal critical mass that can push the machine education concept further towards a standalone research field status.
Networking the Boids is More Robust Against Adversarial Learning
Feb 27, 2018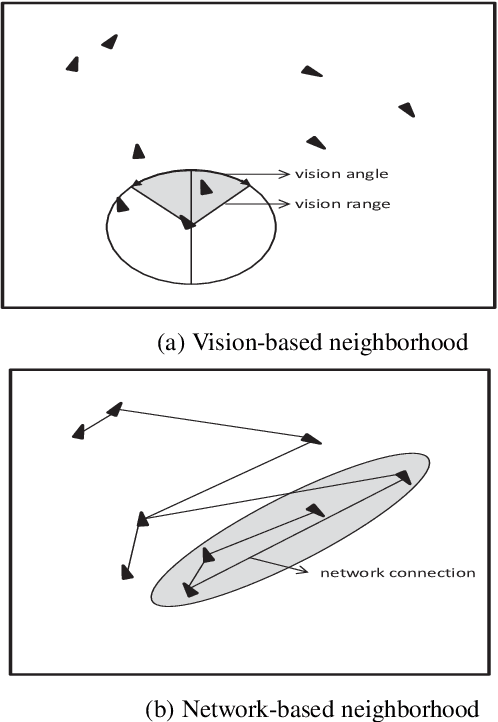
Swarm behavior using Boids-like models has been studied primarily using close-proximity spatial sensory information (e.g. vision range). In this study, we propose a novel approach in which the classic definition of boids\textquoteright \ neighborhood that relies on sensory perception and Euclidian space locality is replaced with graph-theoretic network-based proximity mimicking communication and social networks. We demonstrate that networking the boids leads to faster swarming and higher quality of the formation. We further investigate the effect of adversarial learning, whereby an observer attempts to reverse engineer the dynamics of the swarm through observing its behavior. The results show that networking the swarm demonstrated a more robust approach against adversarial learning than a local-proximity neighborhood structure.
A Multi-Disciplinary Review of Knowledge Acquisition Methods: From Human to Autonomous Eliciting Agents
Feb 27, 2018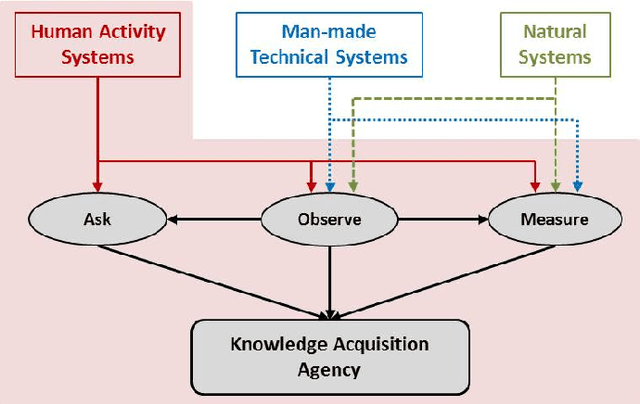

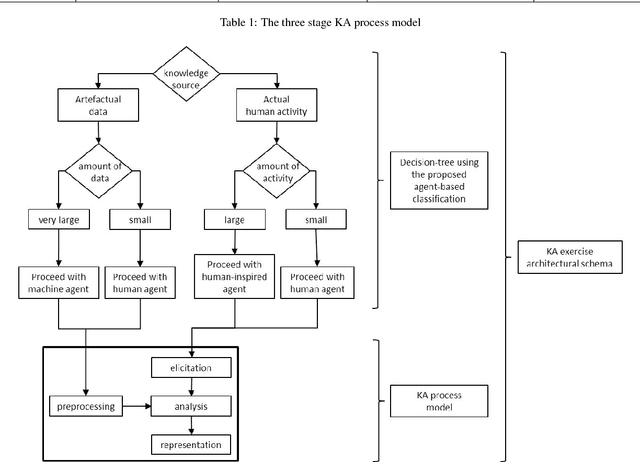
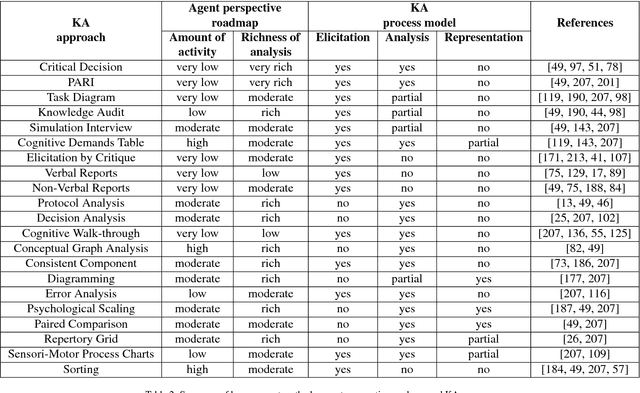
This paper offers a multi-disciplinary review of knowledge acquisition methods in human activity systems. The review captures the degree of involvement of various types of agencies in the knowledge acquisition process, and proposes a classification with three categories of methods: the human agent, the human-inspired agent, and the autonomous machine agent methods. In the first two categories, the acquisition of knowledge is seen as a cognitive task analysis exercise, while in the third category knowledge acquisition is treated as an autonomous knowledge-discovery endeavour. The motivation for this classification stems from the continuous change over time of the structure, meaning and purpose of human activity systems, which are seen as the factor that fuelled researchers' and practitioners' efforts in knowledge acquisition for more than a century. We show through this review that the KA field is increasingly active due to the higher and higher pace of change in human activity, and conclude by discussing the emergence of a fourth category of knowledge acquisition methods, which are based on red-teaming and co-evolution.
Computational Red Teaming in a Sudoku Solving Context: Neural Network Based Skill Representation and Acquisition
Feb 27, 2018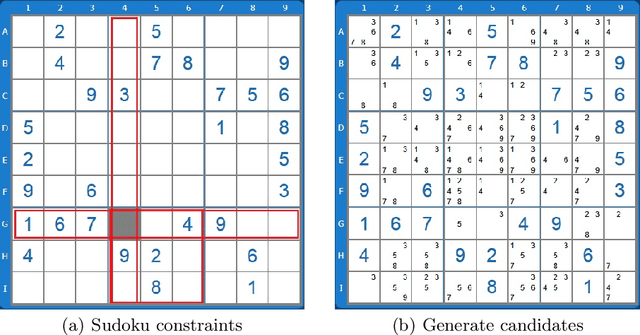

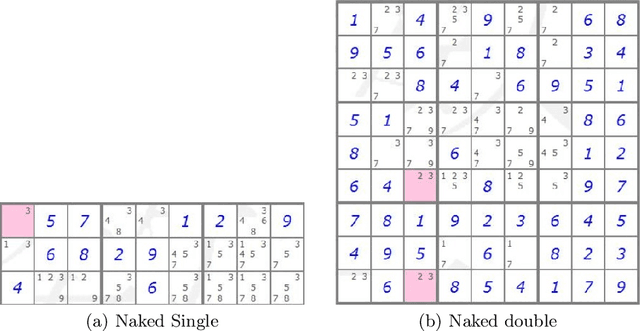

In this paper we provide an insight into the skill representation, where skill representation is seen as an essential part of the skill assessment stage in the Computational Red Teaming process. Skill representation is demonstrated in the context of Sudoku puzzle, for which the real human skills used in Sudoku solving, along with their acquisition, are represented computationally in a cognitively plausible manner, by using feed-forward neural networks with back-propagation, and supervised learning. The neural network based skills are then coupled with a hard-coded constraint propagation computational Sudoku solver, in which the solving sequence is kept hard-coded, and the skills are represented through neural networks. The paper demonstrates that the modified solver can achieve different levels of proficiency, depending on the amount of skills acquired through the neural networks. Results are encouraging for developing more complex skill and skill acquisition models usable in general frameworks related to the skill assessment aspect of Computational Red Teaming.
A Review of Theoretical and Practical Challenges of Trusted Autonomy in Big Data
Mar 16, 2016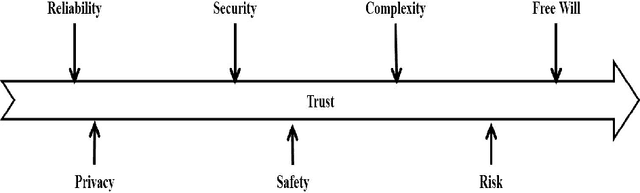
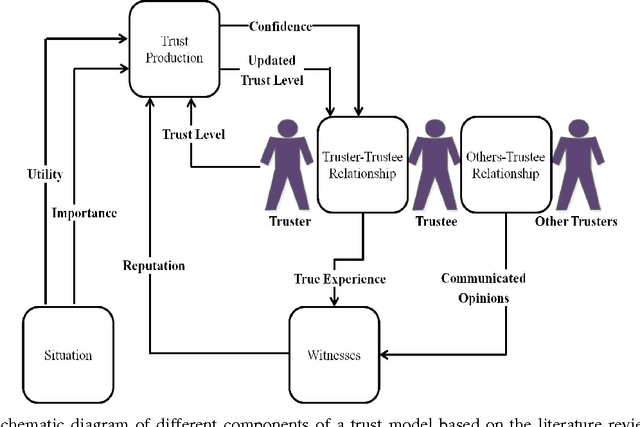
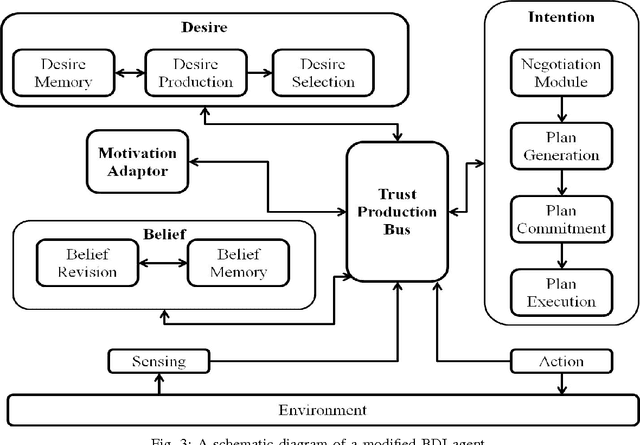
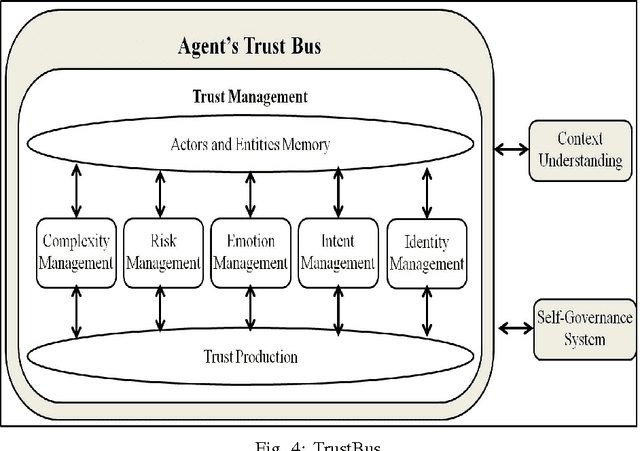
Despite the advances made in artificial intelligence, software agents, and robotics, there is little we see today that we can truly call a fully autonomous system. We conjecture that the main inhibitor for advancing autonomy is lack of trust. Trusted autonomy is the scientific and engineering field to establish the foundations and ground work for developing trusted autonomous systems (robotics and software agents) that can be used in our daily life, and can be integrated with humans seamlessly, naturally and efficiently. In this paper, we review this literature to reveal opportunities for researchers and practitioners to work on topics that can create a leap forward in advancing the field of trusted autonomy. We focus the paper on the `trust' component as the uniting technology between humans and machines. Our inquiry into this topic revolves around three sub-topics: (1) reviewing and positioning the trust modelling literature for the purpose of trusted autonomy; (2) reviewing a critical subset of sensor technologies that allow a machine to sense human states; and (3) distilling some critical questions for advancing the field of trusted autonomy. The inquiry is augmented with conceptual models that we propose along the way by recompiling and reshaping the literature into forms that enables trusted autonomous systems to become a reality. The paper offers a vision for a Trusted Cyborg Swarm, an extension of our previous Cognitive Cyber Symbiosis concept, whereby humans and machines meld together in a harmonious, seamless, and coordinated manner.