 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Review of Theoretical and Practical Challenges of Trusted Autonomy in Big Data
Paper and Code
Mar 16, 2016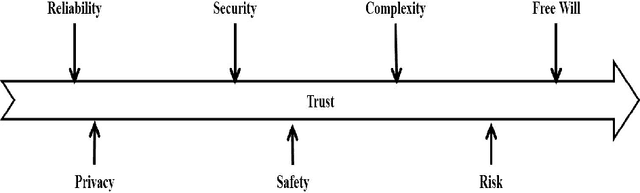
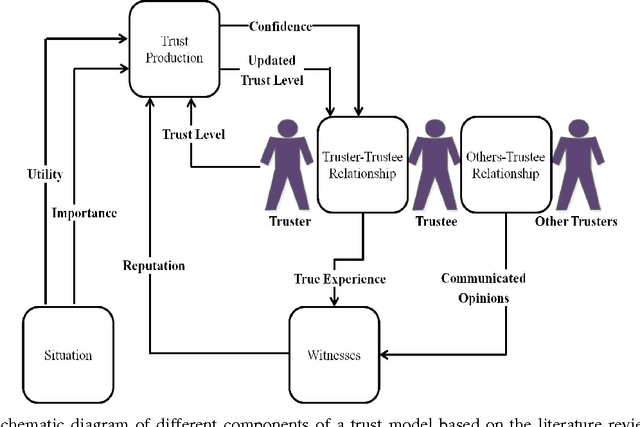
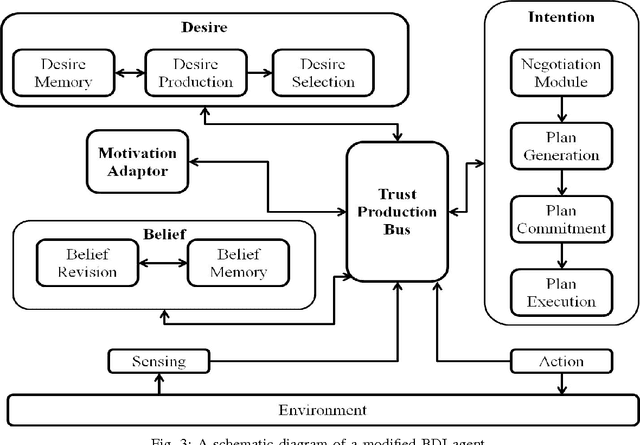
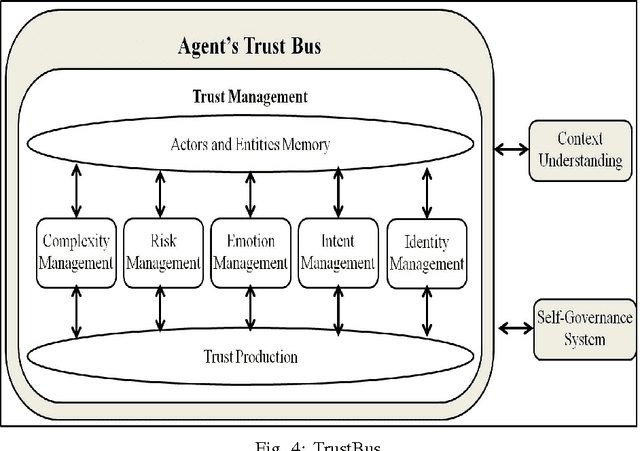
Despite the advances made in artificial intelligence, software agents, and robotics, there is little we see today that we can truly call a fully autonomous system. We conjecture that the main inhibitor for advancing autonomy is lack of trust. Trusted autonomy is the scientific and engineering field to establish the foundations and ground work for developing trusted autonomous systems (robotics and software agents) that can be used in our daily life, and can be integrated with humans seamlessly, naturally and efficiently. In this paper, we review this literature to reveal opportunities for researchers and practitioners to work on topics that can create a leap forward in advancing the field of trusted autonomy. We focus the paper on the `trust' component as the uniting technology between humans and machines. Our inquiry into this topic revolves around three sub-topics: (1) reviewing and positioning the trust modelling literature for the purpose of trusted autonomy; (2) reviewing a critical subset of sensor technologies that allow a machine to sense human states; and (3) distilling some critical questions for advancing the field of trusted autonomy. The inquiry is augmented with conceptual models that we propose along the way by recompiling and reshaping the literature into forms that enables trusted autonomous systems to become a reality. The paper offers a vision for a Trusted Cyborg Swarm, an extension of our previous Cognitive Cyber Symbiosis concept, whereby humans and machines meld together in a harmonious, seamless, and coordinated manner.