 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimisation of Air-Ground Swarm Teaming for Target Search, using Differential Evolution
Sep 13, 2019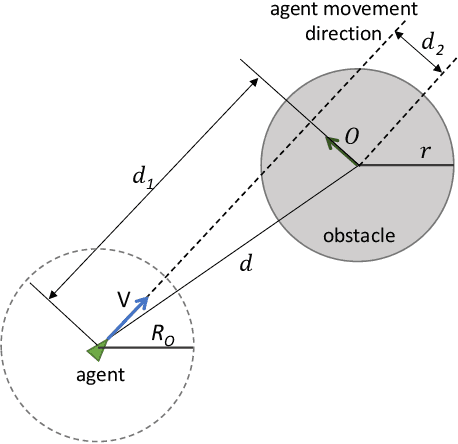
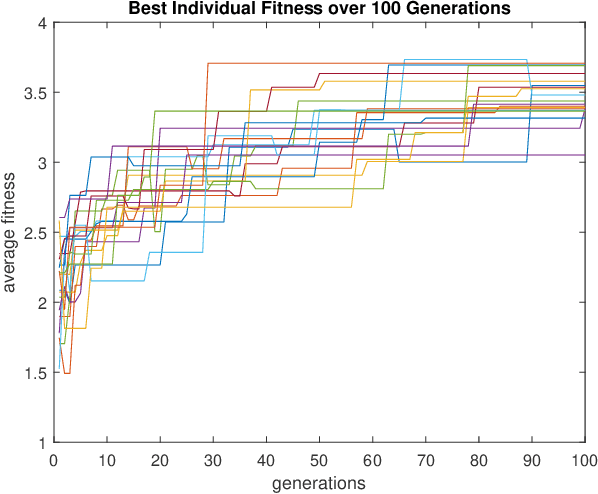
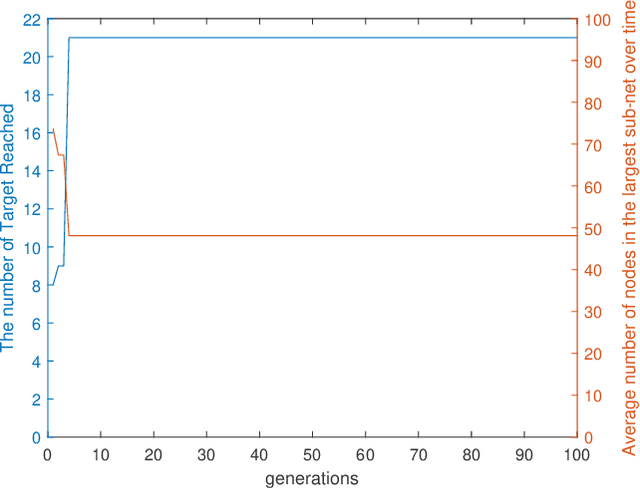
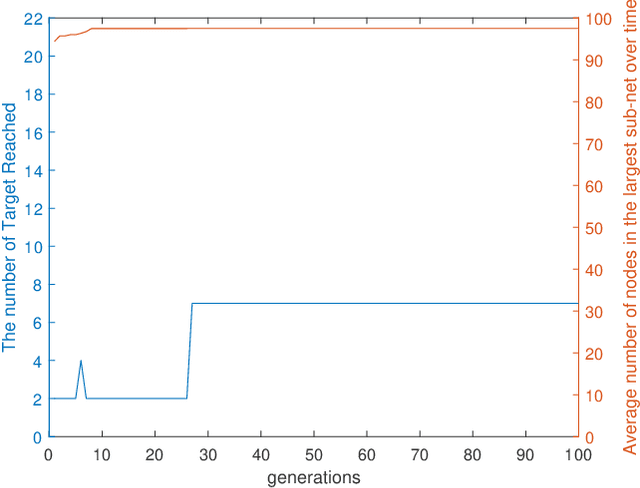
This paper presents a swarm teaming perspective that enhances the scope of classic investigations on survivable networks. A target searching generic context is considered as test-bed, in which a swarm of ground agents and a swarm of UAVs cooperate so that the ground agents reach as many targets as possible in the field while also remaining connected as much as possible at all times. To optimise the system against both these objectives in the same time, we use an evolutionary computation approach in the form of a differential evolution algorithm. Results are encouraging, showing a good evolution of the fitness function used as part of the differential evolution, and a good performance of the evolved dual-swarm system, which exhibits an optimal trade-off between target reaching and connectivity.
On educating machines
Sep 13, 2019Machine education is an emerging research field that focuses on the problem which is inverse to machine learning. To date, the literature on educating machines is still in its infancy. A fairly low number of methodology and method papers are scattered throughout various formal and informal publication avenues, mainly because the field is not yet well coalesced (with no well established discussion forums or investigation pathways), but also due to the breadth of its potential ramifications and research directions. In this study we bring together the existing literature and organise the discussion into a small number of research directions (out of many) which are to date sufficiently explored to form a minimal critical mass that can push the machine education concept further towards a standalone research field status.
Networking the Boids is More Robust Against Adversarial Learning
Feb 27, 2018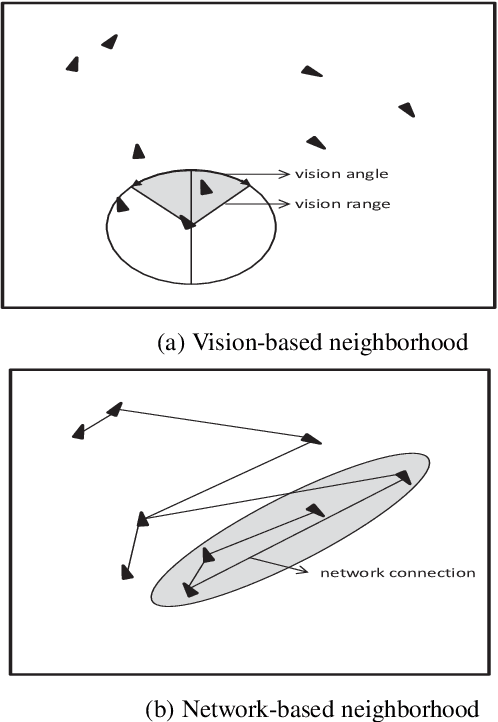
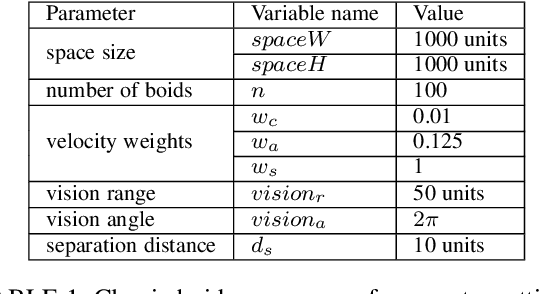
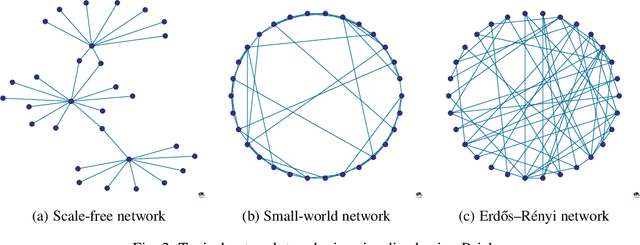
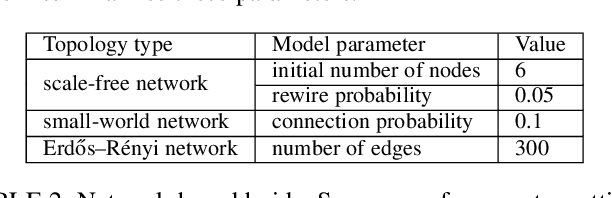
Swarm behavior using Boids-like models has been studied primarily using close-proximity spatial sensory information (e.g. vision range). In this study, we propose a novel approach in which the classic definition of boids\textquoteright \ neighborhood that relies on sensory perception and Euclidian space locality is replaced with graph-theoretic network-based proximity mimicking communication and social networks. We demonstrate that networking the boids leads to faster swarming and higher quality of the formation. We further investigate the effect of adversarial learning, whereby an observer attempts to reverse engineer the dynamics of the swarm through observing its behavior. The results show that networking the swarm demonstrated a more robust approach against adversarial learning than a local-proximity neighborhood structure.
Behavioral Learning of Aircraft Landing Sequencing Using a Society of Probabilistic Finite State Machines
Feb 27, 2018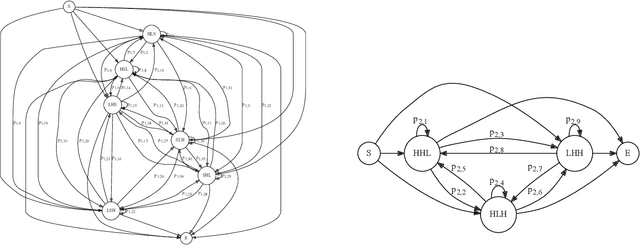
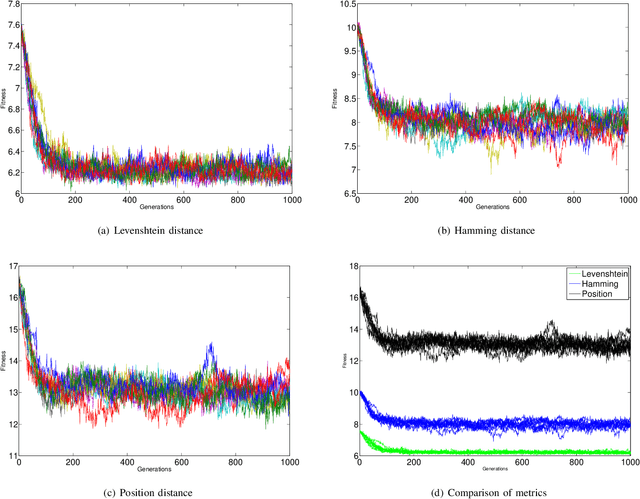
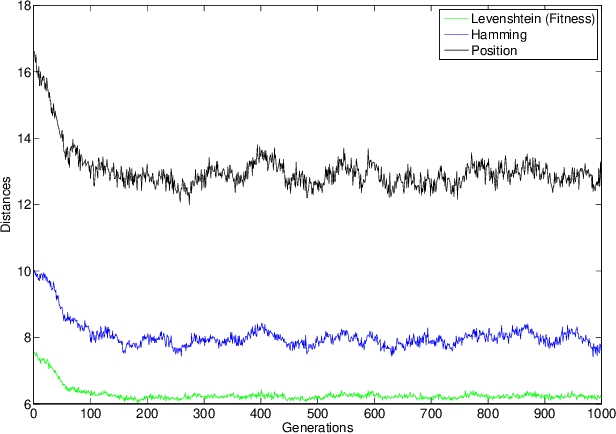
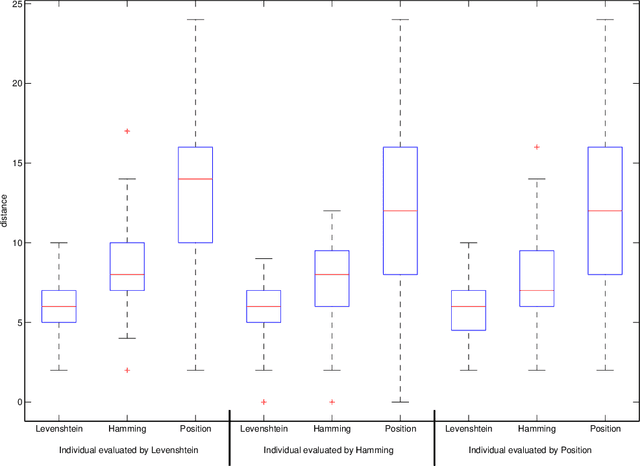
Air Traffic Control (ATC) is a complex safety critical environment. A tower controller would be making many decisions in real-time to sequence aircraft. While some optimization tools exist to help the controller in some airports, even in these situations, the real sequence of the aircraft adopted by the controller is significantly different from the one proposed by the optimization algorithm. This is due to the very dynamic nature of the environment. The objective of this paper is to test the hypothesis that one can learn from the sequence adopted by the controller some strategies that can act as heuristics in decision support tools for aircraft sequencing. This aim is tested in this paper by attempting to learn sequences generated from a well-known sequencing method that is being used in the real world. The approach relies on a genetic algorithm (GA) to learn these sequences using a society Probabilistic Finite-state Machines (PFSMs). Each PFSM learns a different sub-space; thus, decomposing the learning problem into a group of agents that need to work together to learn the overall problem. Three sequence metrics (Levenshtein, Hamming and Position distances) are compared as the fitness functions in GA. As the results suggest, it is possible to learn the behavior of the algorithm/heuristic that generated the original sequence from very limited information.
Shaping Influence and Influencing Shaping: A Computational Red Teaming Trust-based Swarm Intelligence Model
Feb 26, 2018
Sociotechnical systems are complex systems, where nonlinear interaction among different players can obscure causal relationships. The absence of mechanisms to help us understand how to create a change in the system makes it hard to manage these systems. Influencing and shaping are social operators acting on sociotechnical systems to design a change. However, the two operators are usually discussed in an ad-hoc manner, without proper guiding models and metrics which assist in adopting these models successfully. Moreover, both social operators rely on accurate understanding of the concept of trust. Without such understanding, neither of these operators can create the required level to create a change in a desirable direction. In this paper, we define these concepts in a concise manner suitable for modelling the concepts and understanding their dynamics. We then introduce a model for influencing and shaping and use Computational Red Teaming principles to design and demonstrate how this model operates. We validate the results computationally through a simulation environment to show social influencing and shaping in an artificial society.