 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLight Source Estimation with Analytical Path-tracing
Jan 15, 2017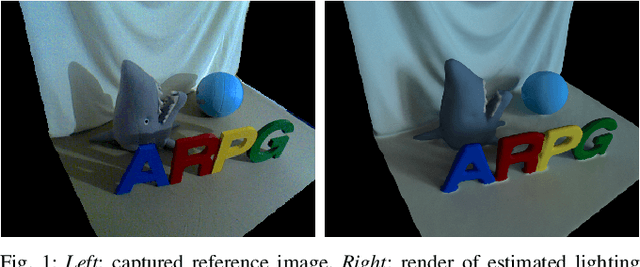
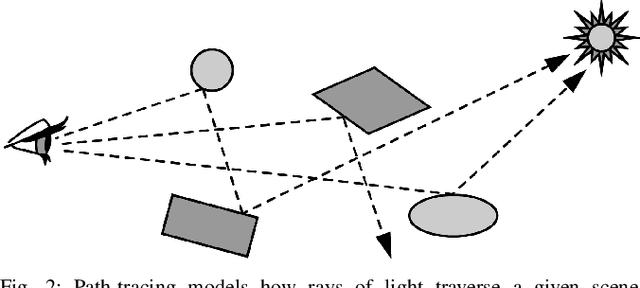
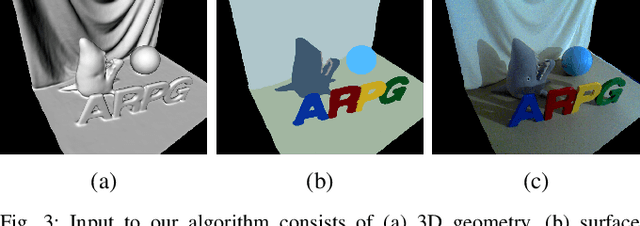
We present a novel algorithm for light source estimation in scenes reconstructed with a RGB-D camera based on an analytically-derived formulation of path-tracing. Our algorithm traces the reconstructed scene with a custom path-tracer and computes the analytical derivatives of the light transport equation from principles in optics. These derivatives are then used to perform gradient descent, minimizing the photometric error between one or more captured reference images and renders of our current lighting estimation using an environment map parameterization for light sources. We show that our approach of modeling all light sources as points at infinity approximates lights located near the scene with surprising accuracy. Due to the analytical formulation of derivatives, optimization to the solution is considerably accelerated. We verify our algorithm using both real and synthetic data.
Online SLAM with Any-time Self-calibration and Automatic Change Detection
Nov 05, 2014
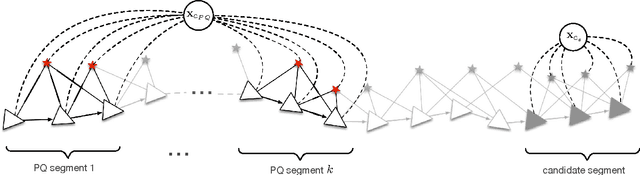
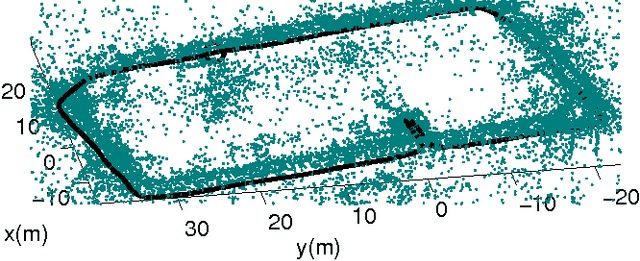
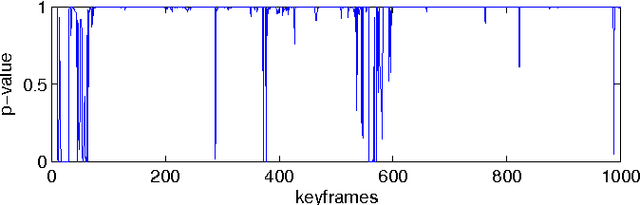
A framework for online simultaneous localization, mapping and self-calibration is presented which can detect and handle significant change in the calibration parameters. Estimates are computed in constant-time by factoring the problem and focusing on segments of the trajectory that are most informative for the purposes of calibration. A novel technique is presented to detect the probability that a significant change is present in the calibration parameters. The system is then able to re-calibrate. Maximum likelihood trajectory and map estimates are computed using an asynchronous and adaptive optimization. The system requires no prior information and is able to initialize without any special motions or routines, or in the case where observability over calibration parameters is delayed. The system is experimentally validated to calibrate camera intrinsic parameters for a nonlinear camera model on a monocular dataset featuring a significant zoom event partway through, and achieves high accuracy despite unknown initial calibration parameters. Self-calibration and re-calibration parameters are shown to closely match estimates computed using a calibration target. The accuracy of the system is demonstrated with SLAM results that achieve sub-1% distance-travel error even in the presence of significant re-calibration events.
Simultaneous Localization, Mapping, and Manipulation for Unsupervised Object Discovery
Nov 04, 2014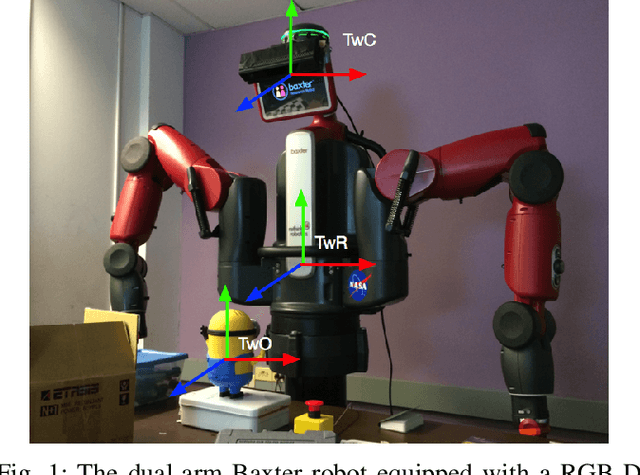
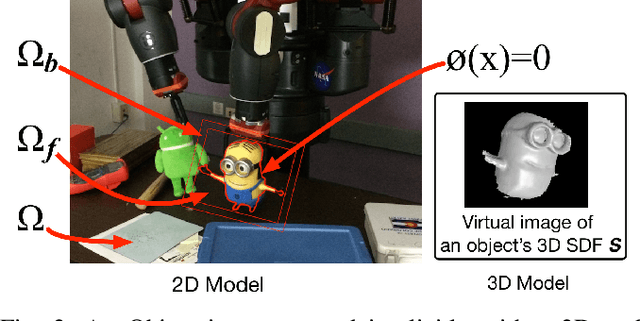
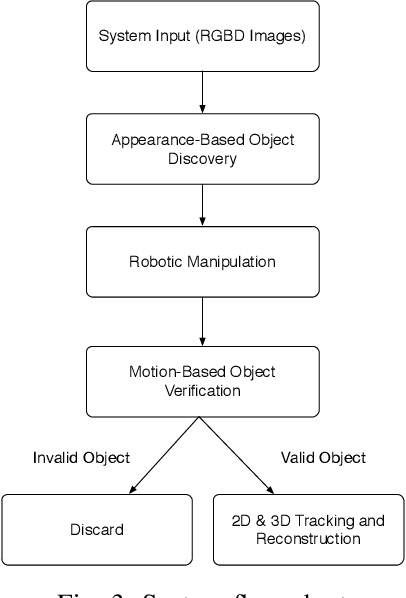
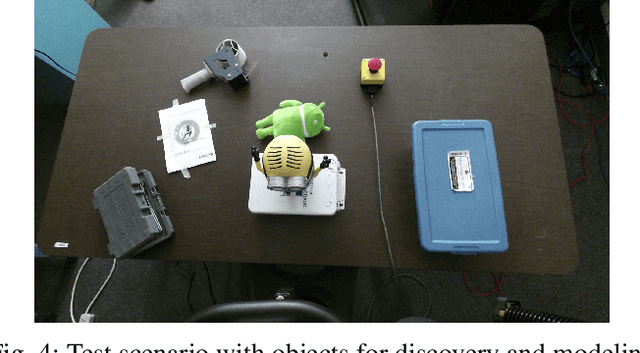
We present an unsupervised framework for simultaneous appearance-based object discovery, detection, tracking and reconstruction using RGBD cameras and a robot manipulator. The system performs dense 3D simultaneous localization and mapping concurrently with unsupervised object discovery. Putative objects that are spatially and visually coherent are manipulated by the robot to gain additional motion-cues. The robot uses appearance alone, followed by structure and motion cues, to jointly discover, verify, learn and improve models of objects. Induced motion segmentation reinforces learned models which are represented implicitly as 2D and 3D level sets to capture both shape and appearance. We compare three different approaches for appearance-based object discovery and find that a novel form of spatio-temporal super-pixels gives the highest quality candidate object models in terms of precision and recall. Live experiments with a Baxter robot demonstrate a holistic pipeline capable of automatic discovery, verification, detection, tracking and reconstruction of unknown objects.