 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-modal estimation of the properties of containers and their content: survey and evaluation
Jul 27, 2021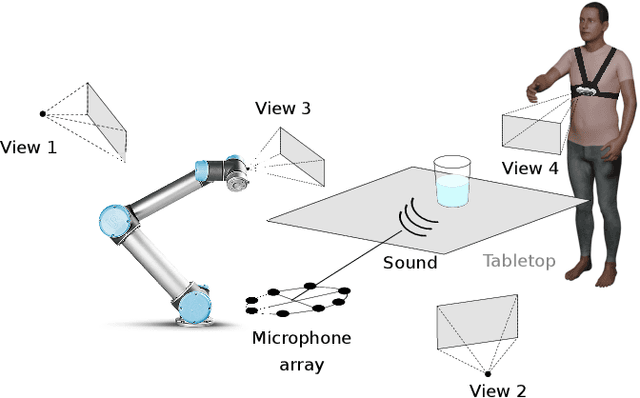


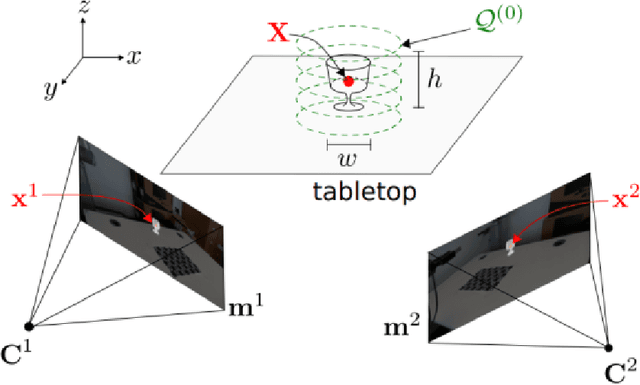
Acoustic and visual sensing can support the contactless estimation of the weight of a container and the amount of its content when the container is manipulated by a person. However, transparencies (both of the container and of the content) and the variability of materials, shapes and sizes make this problem challenging. In this paper, we present an open benchmarking framework and an in-depth comparative analysis of recent methods that estimate the capacity of a container, as well as the type, mass, and amount of its content. These methods use learned and handcrafted features, such as mel-frequency cepstrum coefficients, zero-crossing rate, spectrograms, with different types of classifiers to estimate the type and amount of the content with acoustic data, and geometric approaches with visual data to determine the capacity of the container. Results on a newly distributed dataset show that audio alone is a strong modality and methods achieves a weighted average F1-score up to 81% and 97% for content type and level classification, respectively. Estimating the container capacity with vision-only approaches and filling mass with multi-modal, multi-stage algorithms reaches up to 65% weighted average capacity and mass scores.
Top-1 CORSMAL Challenge 2020 Submission: Filling Mass Estimation Using Multi-modal Observations of Human-robot Handovers
Dec 02, 2020
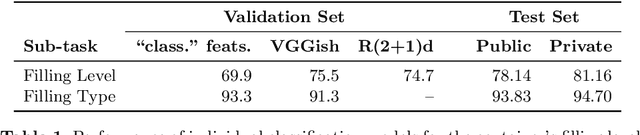
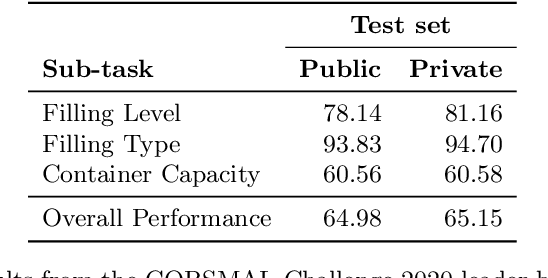
Human-robot object handover is a key skill for the future of human-robot collaboration. CORSMAL 2020 Challenge focuses on the perception part of this problem: the robot needs to estimate the filling mass of a container held by a human. Although there are powerful methods in image processing and audio processing individually, answering such a problem requires processing data from multiple sensors together. The appearance of the container, the sound of the filling, and the depth data provide essential information. We propose a multi-modal method to predict three key indicators of the filling mass: filling type, filling level, and container capacity. These indicators are then combined to estimate the filling mass of a container. Our method obtained Top-1 overall performance among all submissions to CORSMAL 2020 Challenge on both public and private subsets while showing no evidence of overfitting. Our source code is publicly available: https://github.com/v-iashin/CORSMAL