 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARMOR: Adaptive Meshing with Reinforcement Optimization for Real-time 3D Monitoring in Unexposed Scenes
Apr 28, 2025Unexposed environments, such as lava tubes, mines, and tunnels, are among the most complex yet strategically significant domains for scientific exploration and infrastructure development. Accurate and real-time 3D meshing of these environments is essential for applications including automated structural assessment, robotic-assisted inspection, and safety monitoring. Implicit neural Signed Distance Fields (SDFs) have shown promising capabilities in online meshing; however, existing methods often suffer from large projection errors and rely on fixed reconstruction parameters, limiting their adaptability to complex and unstructured underground environments such as tunnels, caves, and lava tubes. To address these challenges, this paper proposes ARMOR, a scene-adaptive and reinforcement learning-based framework for real-time 3D meshing in unexposed environments. The proposed method was validated across more than 3,000 meters of underground environments, including engineered tunnels, natural caves, and lava tubes. Experimental results demonstrate that ARMOR achieves superior performance in real-time mesh reconstruction, reducing geometric error by 3.96\% compared to state-of-the-art baselines, while maintaining real-time efficiency. The method exhibits improved robustness, accuracy, and adaptability, indicating its potential for advanced 3D monitoring and mapping in challenging unexposed scenarios. The project page can be found at: https://yizhezhang0418.github.io/armor.github.io/
Reliable-loc: Robust sequential LiDAR global localization in large-scale street scenes based on verifiable cues
Nov 09, 2024Wearable laser scanning (WLS) system has the advantages of flexibility and portability. It can be used for determining the user's path within a prior map, which is a huge demand for applications in pedestrian navigation, collaborative mapping, augmented reality, and emergency rescue. However, existing LiDAR-based global localization methods suffer from insufficient robustness, especially in complex large-scale outdoor scenes with insufficient features and incomplete coverage of the prior map. To address such challenges, we propose LiDAR-based reliable global localization (Reliable-loc) exploiting the verifiable cues in the sequential LiDAR data. First, we propose a Monte Carlo Localization (MCL) based on spatially verifiable cues, utilizing the rich information embedded in local features to adjust the particles' weights hence avoiding the particles converging to erroneous regions. Second, we propose a localization status monitoring mechanism guided by the sequential pose uncertainties and adaptively switching the localization mode using the temporal verifiable cues to avoid the crash of the localization system. To validate the proposed Reliable-loc, comprehensive experiments have been conducted on a large-scale heterogeneous point cloud dataset consisting of high-precision vehicle-mounted mobile laser scanning (MLS) point clouds and helmet-mounted WLS point clouds, which cover various street scenes with a length of over 20km. The experimental results indicate that Reliable-loc exhibits high robustness, accuracy, and efficiency in large-scale, complex street scenes, with a position accuracy of 1.66m, yaw accuracy of 3.09 degrees, and achieves real-time performance. For the code and detailed experimental results, please refer to https://github.com/zouxianghong/Reliable-loc.
CoFiI2P: Coarse-to-Fine Correspondences for Image-to-Point Cloud Registration
Sep 26, 2023



Image-to-point cloud (I2P) registration is a fundamental task in the fields of robot navigation and mobile mapping. Existing I2P registration works estimate correspondences at the point-to-pixel level, neglecting the global alignment. However, I2P matching without high-level guidance from global constraints may converge to the local optimum easily. To solve the problem, this paper proposes CoFiI2P, a novel I2P registration network that extracts correspondences in a coarse-to-fine manner for the global optimal solution. First, the image and point cloud are fed into a Siamese encoder-decoder network for hierarchical feature extraction. Then, a coarse-to-fine matching module is designed to exploit features and establish resilient feature correspondences. Specifically, in the coarse matching block, a novel I2P transformer module is employed to capture the homogeneous and heterogeneous global information from image and point cloud. With the discriminate descriptors, coarse super-point-to-super-pixel matching pairs are estimated. In the fine matching module, point-to-pixel pairs are established with the super-point-to-super-pixel correspondence supervision. Finally, based on matching pairs, the transform matrix is estimated with the EPnP-RANSAC algorithm. Extensive experiments conducted on the KITTI dataset have demonstrated that CoFiI2P achieves a relative rotation error (RRE) of 2.25 degrees and a relative translation error (RTE) of 0.61 meters. These results represent a significant improvement of 14% in RRE and 52% in RTE compared to the current state-of-the-art (SOTA) method. The demo video for the experiments is available at https://youtu.be/TG2GBrJTuW4. The source code will be public at https://github.com/kang-1-2-3/CoFiI2P.
Iterative Global Similarity Points : A robust coarse-to-fine integration solution for pairwise 3D point cloud registration
Aug 12, 2018

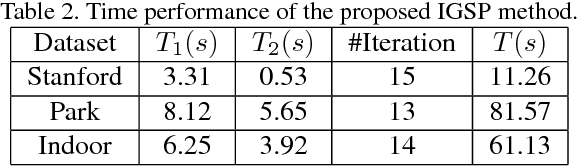
In this paper, we propose a coarse-to-fine integration solution inspired by the classical ICP algorithm, to pairwise 3D point cloud registration with two improvements of hybrid metric spaces (eg, BSC feature and Euclidean geometry spaces) and globally optimal correspondences matching. First, we detect the keypoints of point clouds and use the Binary Shape Context (BSC) descriptor to encode their local features. Then, we formulate the correspondence matching task as an energy function, which models the global similarity of keypoints on the hybrid spaces of BSC feature and Euclidean geometry. Next, we estimate the globally optimal correspondences through optimizing the energy function by the Kuhn-Munkres algorithm and then calculate the transformation based on the correspondences. Finally,we iteratively refine the transformation between two point clouds by conducting optimal correspondences matching and transformation calculation in a mutually reinforcing manner, to achieve the coarse-to-fine registration under an unified framework.The proposed method is evaluated and compared to several state-of-the-art methods on selected challenging datasets with repetitive, symmetric and incomplete structures.Comprehensive experiments demonstrate that the proposed IGSP algorithm obtains good performance and outperforms the state-of-the-art methods in terms of both rotation and translation errors.