 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge-Driven Robot Program Synthesis from Human VR Demonstrations
Jun 05, 2023



Aging societies, labor shortages and increasing wage costs call for assistance robots capable of autonomously performing a wide array of real-world tasks. Such open-ended robotic manipulation requires not only powerful knowledge representations and reasoning (KR&R) algorithms, but also methods for humans to instruct robots what tasks to perform and how to perform them. In this paper, we present a system for automatically generating executable robot control programs from human task demonstrations in virtual reality (VR). We leverage common-sense knowledge and game engine-based physics to semantically interpret human VR demonstrations, as well as an expressive and general task representation and automatic path planning and code generation, embedded into a state-of-the-art cognitive architecture. We demonstrate our approach in the context of force-sensitive fetch-and-place for a robotic shopping assistant. The source code is available at https://github.com/ease-crc/vr-program-synthesis.
Imagination-enabled Robot Perception
Nov 27, 2020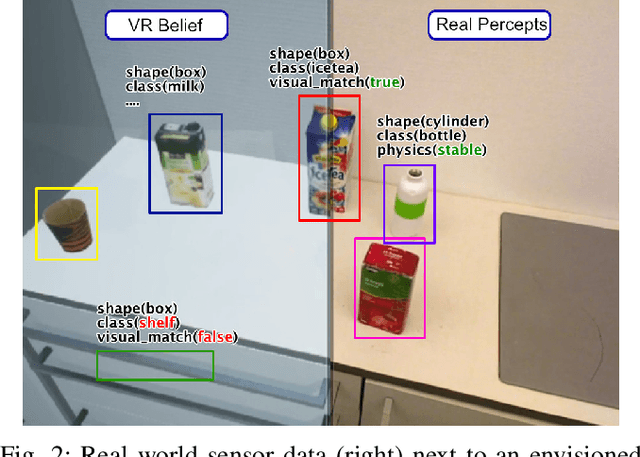
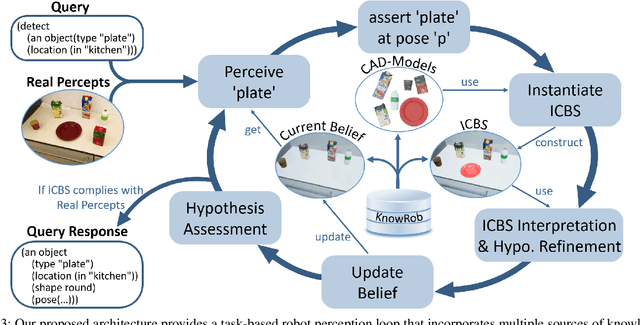
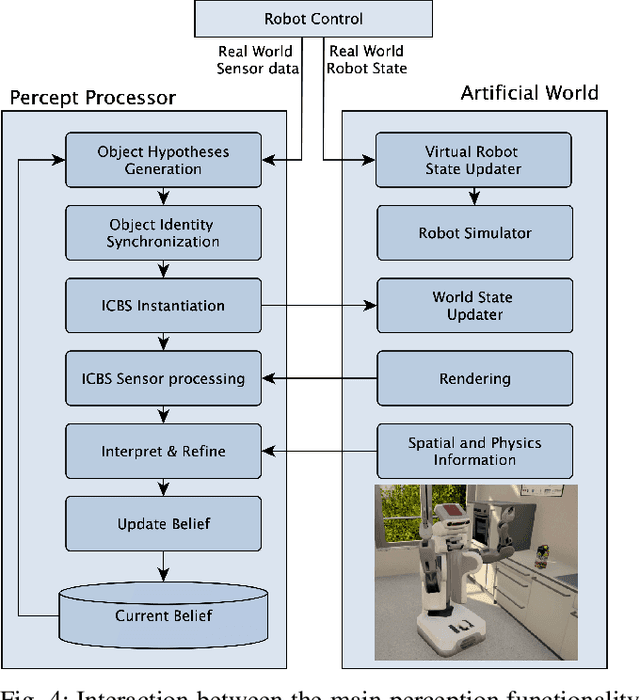
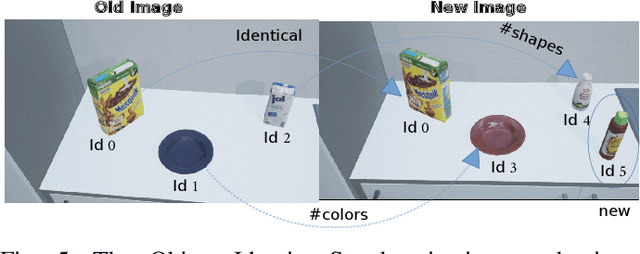
Many of today's robot perception systems aim at accomplishing perception tasks that are too simplistic and too hard. They are too simplistic because they do not require the perception systems to provide all the information needed to accomplish manipulation tasks. Typically the perception results do not include information about the part structure of objects, articulation mechanisms and other attributes needed for adapting manipulation behavior. On the other hand, the perception problems stated are also too hard because -- unlike humans -- the perception systems cannot leverage the expectations about what they will see to their full potential. Therefore, we investigate a variation of robot perception tasks suitable for robots accomplishing everyday manipulation tasks, such as household robots or a robot in a retail store. In such settings it is reasonable to assume that robots know most objects and have detailed models of them. We propose a perception system that maintains its beliefs about its environment as a scene graph with physics simulation and visual rendering. When detecting objects, the perception system retrieves the model of the object and places it at the corresponding place in a VR-based environment model. The physics simulation ensures that object detections that are physically not possible are rejected and scenes can be rendered to generate expectations at the image level. The result is a perception system that can provide useful information for manipulation tasks.
The Robot Household Marathon Experiment
Nov 19, 2020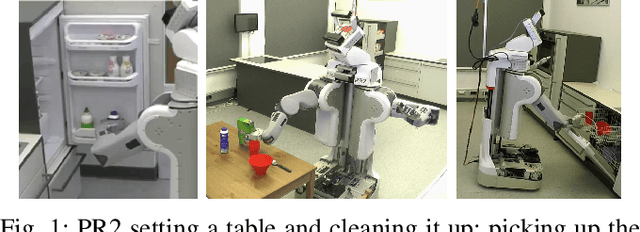
In this paper, we present an experiment, designed to investigate and evaluate the scalability and the robustness aspects of mobile manipulation. The experiment involves performing variations of mobile pick and place actions and opening/closing environment containers in a human household. The robot is expected to act completely autonomously for extended periods of time. We discuss the scientific challenges raised by the experiment as well as present our robotic system that can address these challenges and successfully perform all the tasks of the experiment. We present empirical results and the lessons learned as well as discuss where we hit limitations.