 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeURoboSim -- An Episodic Simulation Framework for Prospective Reasoning in Robotic Agents
Dec 08, 2020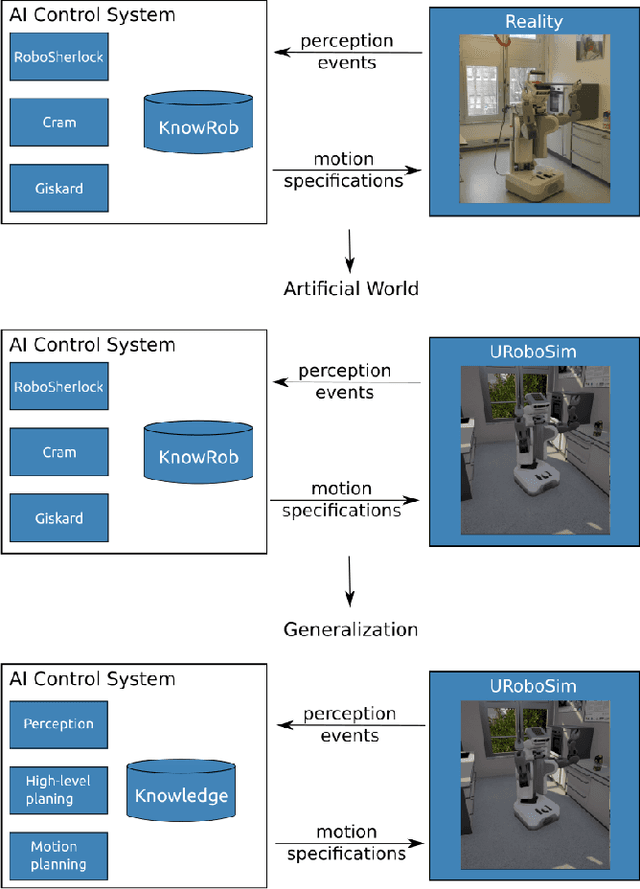
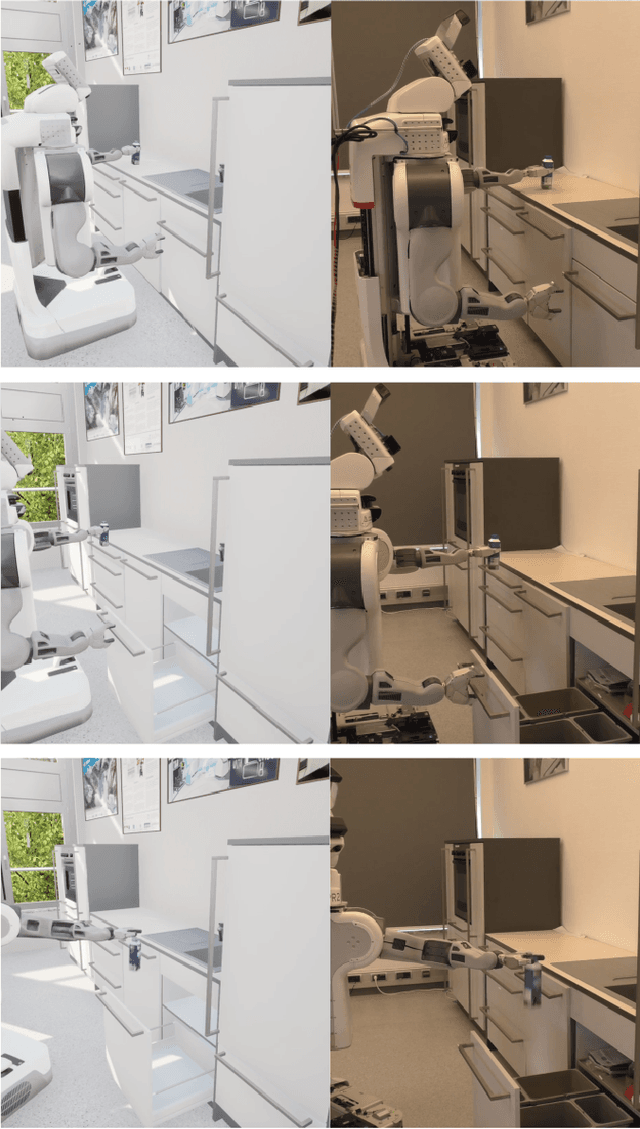

Anticipating what might happen as a result of an action is an essential ability humans have in order to perform tasks effectively. On the other hand, robots capabilities in this regard are quite lacking. While machine learning is used to increase the ability of prospection it is still limiting for novel situations. A possibility to improve the prospection ability of robots is through simulation of imagined motions and the physical results of these actions. Therefore, we present URoboSim, a robot simulator that allows robots to perform tasks as mental simulation before performing this task in reality. We show the capabilities of URoboSim in form of mental simulations, generating data for machine learning and the usage as belief state for a real robot.
The Robot Household Marathon Experiment
Nov 19, 2020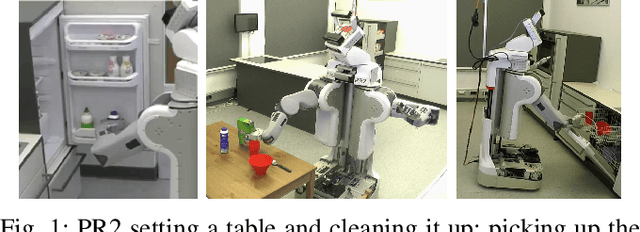
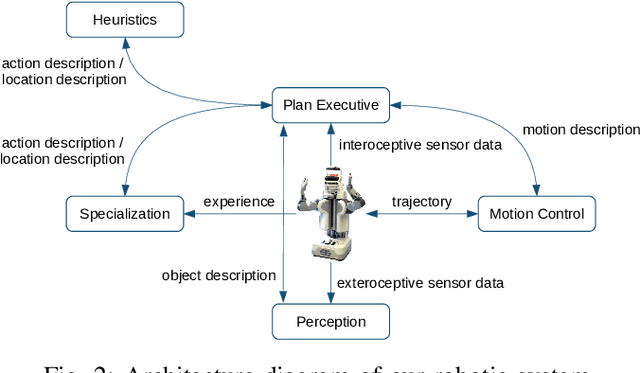
In this paper, we present an experiment, designed to investigate and evaluate the scalability and the robustness aspects of mobile manipulation. The experiment involves performing variations of mobile pick and place actions and opening/closing environment containers in a human household. The robot is expected to act completely autonomously for extended periods of time. We discuss the scientific challenges raised by the experiment as well as present our robotic system that can address these challenges and successfully perform all the tasks of the experiment. We present empirical results and the lessons learned as well as discuss where we hit limitations.