 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving the generalizability and robustness of large-scale traffic signal control
Jun 08, 2023A number of deep reinforcement-learning (RL) approaches propose to control traffic signals. In this work, we study the robustness of such methods along two axes. First, sensor failures and GPS occlusions create missing-data challenges and we show that recent methods remain brittle in the face of these missing data. Second, we provide a more systematic study of the generalization ability of RL methods to new networks with different traffic regimes. Again, we identify the limitations of recent approaches. We then propose using a combination of distributional and vanilla reinforcement learning through a policy ensemble. Building upon the state-of-the-art previous model which uses a decentralized approach for large-scale traffic signal control with graph convolutional networks (GCNs), we first learn models using a distributional reinforcement learning (DisRL) approach. In particular, we use implicit quantile networks (IQN) to model the state-action return distribution with quantile regression. For traffic signal control problems, an ensemble of standard RL and DisRL yields superior performance across different scenarios, including different levels of missing sensor data and traffic flow patterns. Furthermore, the learning scheme of the resulting model can improve zero-shot transferability to different road network structures, including both synthetic networks and real-world networks (e.g., Luxembourg, Manhattan). We conduct extensive experiments to compare our approach to multi-agent reinforcement learning and traditional transportation approaches. Results show that the proposed method improves robustness and generalizability in the face of missing data, varying road networks, and traffic flows.
RCC-GAN: Regularized Compound Conditional GAN for Large-Scale Tabular Data Synthesis
May 24, 2022
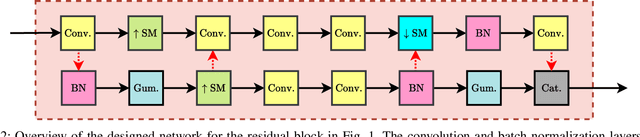
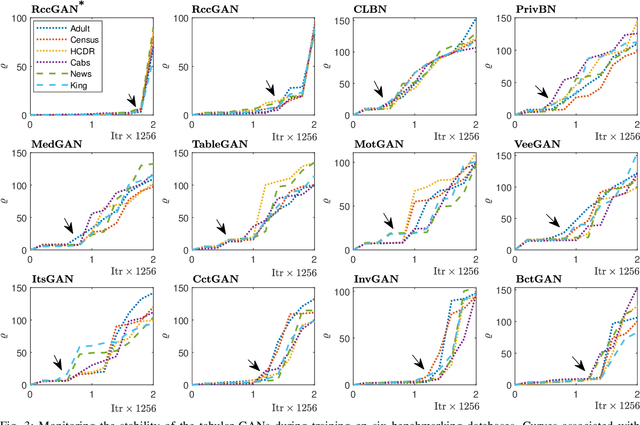
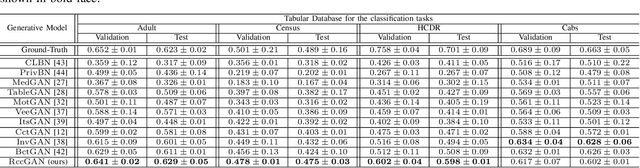
This paper introduces a novel generative adversarial network (GAN) for synthesizing large-scale tabular databases which contain various features such as continuous, discrete, and binary. Technically, our GAN belongs to the category of class-conditioned generative models with a predefined conditional vector. However, we propose a new formulation for deriving such a vector incorporating both binary and discrete features simultaneously. We refer to this noble definition as compound conditional vector and employ it for training the generator network. The core architecture of this network is a three-layered deep residual neural network with skip connections. For improving the stability of such complex architecture, we present a regularization scheme towards limiting unprecedented variations on its weight vectors during training. This regularization approach is quite compatible with the nature of adversarial training and it is not computationally prohibitive in runtime. Furthermore, we constantly monitor the variation of the weight vectors for identifying any potential instabilities or irregularities to measure the strength of our proposed regularizer. Toward this end, we also develop a new metric for tracking sudden perturbation on the weight vectors using the singular value decomposition theory. Finally, we evaluate the performance of our proposed synthesis approach on six benchmarking tabular databases, namely Adult, Census, HCDR, Cabs, News, and King. The achieved results corroborate that for the majority of the cases, our proposed RccGAN outperforms other conventional and modern generative models in terms of accuracy, stability, and reliability.
Bi-Discriminator Class-Conditional Tabular GAN
Dec 02, 2021
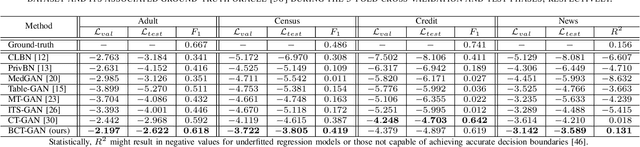
This paper introduces a bi-discriminator GAN for synthesizing tabular datasets containing continuous, binary, and discrete columns. Our proposed approach employs an adapted preprocessing scheme and a novel conditional term for the generator network to more effectively capture the input sample distributions. Additionally, we implement straightforward yet effective architectures for discriminator networks aiming at providing more discriminative gradient information to the generator. Our experimental results on four benchmarking public datasets corroborates the superior performance of our GAN both in terms of likelihood fitness metric and machine learning efficacy.