 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of computer networking methods for interaction with remote robotic systems
Oct 12, 2021



Use of robotic infrastructures can significantly increase with remote access. This would open up the possibility to use costly equipment without the need to buy them, or to simply access those assets remotely when actual travel is not possible or recommended - for example in pandemic times. In this paper we present an analysis of several networking techniques which allow remote robotics operations, alongside with experimental results with distance ranging from hundreds of meters up to thousands of kilometers.
Positioning aiding using LiDAR in GPS signal loss scenarios
May 17, 2019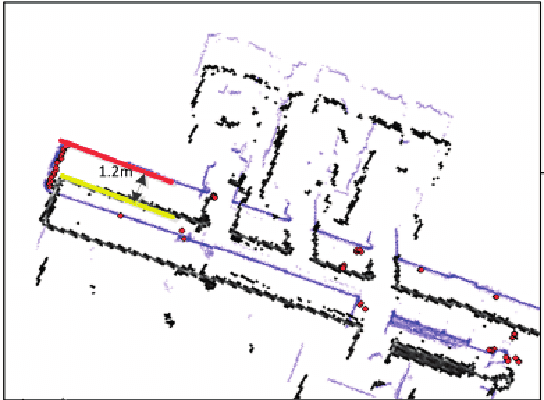
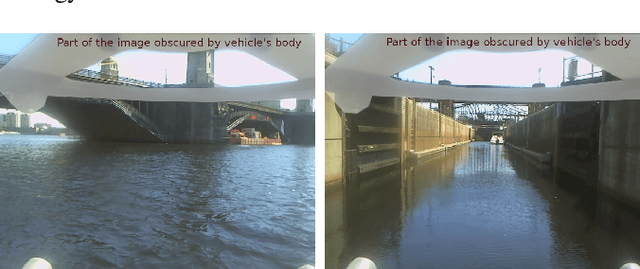

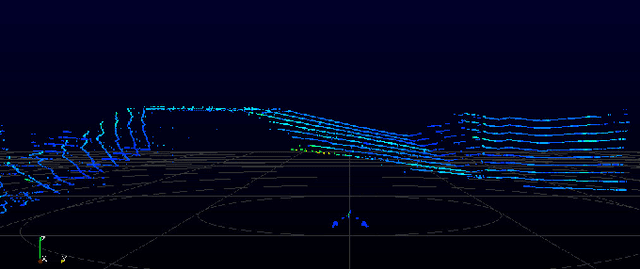
In the presented scenario, an autonomous surface vehicle (ASV) equipped with a laser scanner navigates on a inland pathway surrounded and crossed by man-made structures such as bridges and locks. {GPS} receiver present on board experiences signal loss and multipath reflections in situation when the view of the sky is obscured by a bridge or tall buildings. In both cases, a potentially dangerous situation is provoked as the robot has no or inaccurate positioning data. A sensor data processing scheme is proposed where these gaps are smoothly filled in by positioning data generated from scan matching and registration of the laser data. This article shows preliminary results of positioning data improvement during trials in harbor-river environment.
A semantic-aided particle filter approach for AUV localization
May 17, 2019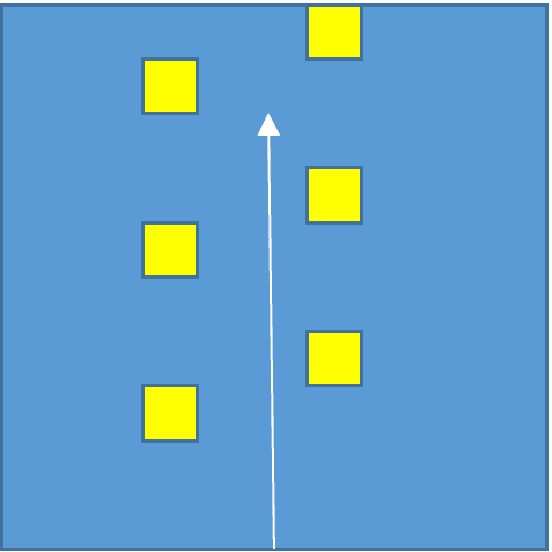

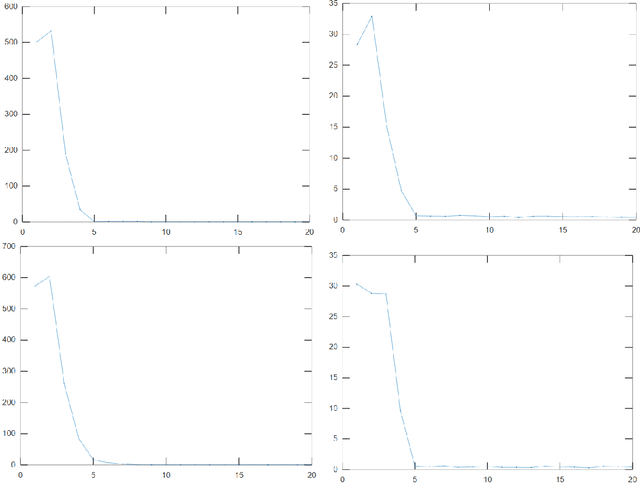
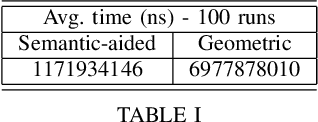
This paper presents a novel approach to AUV localization, based on a semantic-aided particle filter. Particle filters have been used successfully for robotics localization since many years. Most of the approaches are however based on geometric measurements and geometric information and simulations. In the past years more and more efforts from research goes towards cognitive robotics and the marine domain is not exception. Moving from signal to symbol becomes therefore paramount for more complex applications. This paper presents a contribution in the well-known area of underwater localization, incorporating semantic information. An extension to the standard particle filter approach is presented, based on semantic information of the environment. A comparison with the geometric approach shows the advantages of a semantic layer to successfully perform self-localization.
Blue Sky Ideas in Artificial Intelligence Education from the EAAI 2017 New and Future AI Educator Program
Feb 01, 2017The 7th Symposium on Educational Advances in Artificial Intelligence (EAAI'17, co-chaired by Sven Koenig and Eric Eaton) launched the EAAI New and Future AI Educator Program to support the training of early-career university faculty, secondary school faculty, and future educators (PhD candidates or postdocs who intend a career in academia). As part of the program, awardees were asked to address one of the following "blue sky" questions: * How could/should Artificial Intelligence (AI) courses incorporate ethics into the curriculum? * How could we teach AI topics at an early undergraduate or a secondary school level? * AI has the potential for broad impact to numerous disciplines. How could we make AI education more interdisciplinary, specifically to benefit non-engineering fields? This paper is a collection of their responses, intended to help motivate discussion around these issues in AI education.