 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim-to-reality adaptation for Deep Reinforcement Learning applied to an underwater docking application
Mar 12, 2026Deep Reinforcement Learning (DRL) offers a robust alternative to traditional control methods for autonomous underwater docking, particularly in adapting to unpredictable environmental conditions. However, bridging the "sim-to-real" gap and managing high training latencies remain significant bottlenecks for practical deployment. This paper presents a systematic approach for autonomous docking using the Girona Autonomous Underwater Vehicle (AUV) by leveraging a high-fidelity digital twin environment. We adapted the Stonefish simulator into a multiprocessing RL framework to significantly accelerate the learning process while incorporating realistic AUV dynamics, collision models, and sensor noise. Using the Proximal Policy Optimization (PPO) algorithm, we developed a 6-DoF control policy trained in a headless environment with randomized starting positions to ensure generalized performance. Our reward structure accounts for distance, orientation, action smoothness, and adaptive collision penalties to facilitate soft docking. Experimental results demonstrate that the agent achieved a success rate of over 90% in simulation. Furthermore, successful validation in a physical test tank confirmed the efficacy of the sim-to-reality adaptation, with the DRL controller exhibiting emergent behaviors such as pitch-based braking and yaw oscillations to assist in mechanical alignment.
Evaluation of computer networking methods for interaction with remote robotic systems
Oct 12, 2021



Use of robotic infrastructures can significantly increase with remote access. This would open up the possibility to use costly equipment without the need to buy them, or to simply access those assets remotely when actual travel is not possible or recommended - for example in pandemic times. In this paper we present an analysis of several networking techniques which allow remote robotics operations, alongside with experimental results with distance ranging from hundreds of meters up to thousands of kilometers.
Testing SPARUS II AUV, an open platform for industrial, scientific and academic applications
Nov 06, 2018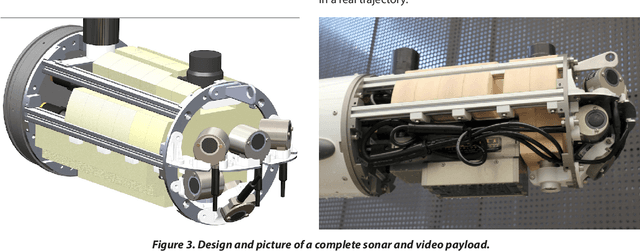
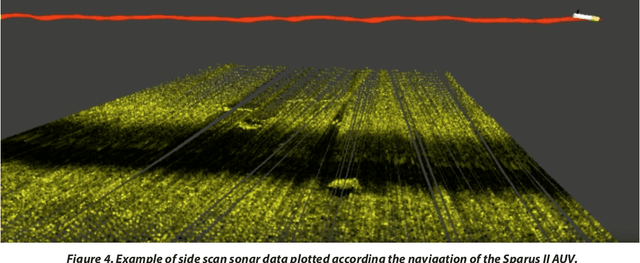
This paper describes the experience of preparing and testing the SPARUS II AUV in different applications. The AUV was designed as a lightweight vehicle combining the classical torpedo-shape features with the hovering capability. The robot has a payload area to allow the integration of different equipment depending on the application. The software architecture is based on ROS, an open framework that allows an easy integration of many devices and systems. Its flexibility, easy operation and openness makes the SPARUS II AUV a multipurpose platform that can adapt to industrial, scientific and academic applications. Five units were developed in 2014, and different teams used and adapted the platform for different applications. The paper describes some of the experiences in preparing and testing this open platform to different applications.