 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTesting SPARUS II AUV, an open platform for industrial, scientific and academic applications
Nov 06, 2018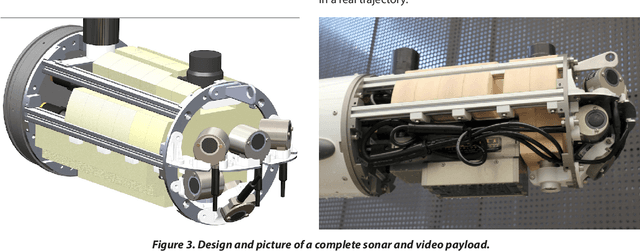
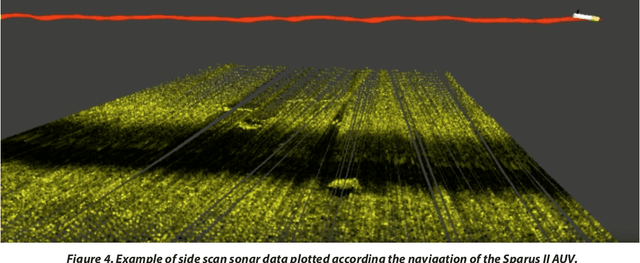
This paper describes the experience of preparing and testing the SPARUS II AUV in different applications. The AUV was designed as a lightweight vehicle combining the classical torpedo-shape features with the hovering capability. The robot has a payload area to allow the integration of different equipment depending on the application. The software architecture is based on ROS, an open framework that allows an easy integration of many devices and systems. Its flexibility, easy operation and openness makes the SPARUS II AUV a multipurpose platform that can adapt to industrial, scientific and academic applications. Five units were developed in 2014, and different teams used and adapted the platform for different applications. The paper describes some of the experiences in preparing and testing this open platform to different applications.