 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpherical Voronoi: Directional Appearance as a Differentiable Partition of the Sphere
Dec 16, 2025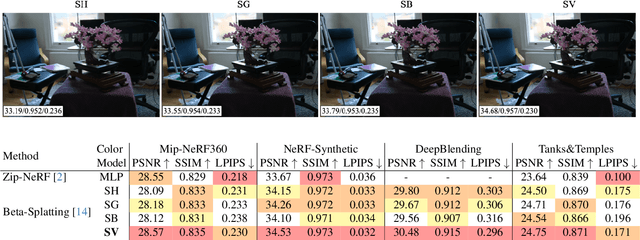
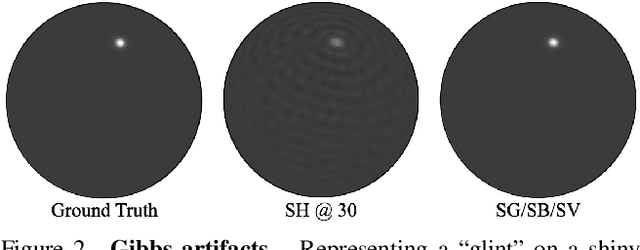
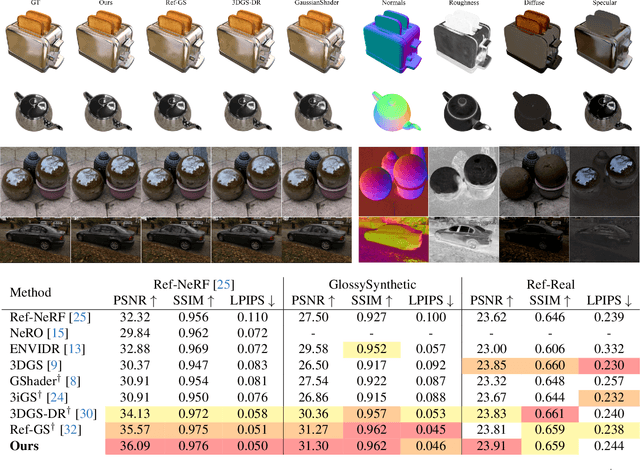
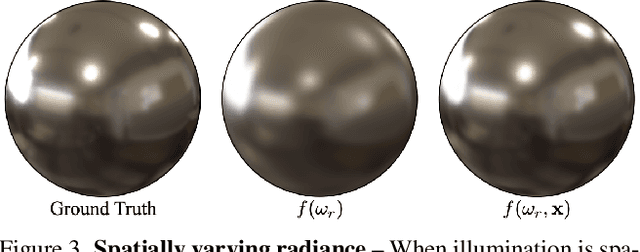
Radiance field methods (e.g. 3D Gaussian Splatting) have emerged as a powerful paradigm for novel view synthesis, yet their appearance modeling often relies on Spherical Harmonics (SH), which impose fundamental limitations. SH struggle with high-frequency signals, exhibit Gibbs ringing artifacts, and fail to capture specular reflections - a key component of realistic rendering. Although alternatives like spherical Gaussians offer improvements, they add significant optimization complexity. We propose Spherical Voronoi (SV) as a unified framework for appearance representation in 3D Gaussian Splatting. SV partitions the directional domain into learnable regions with smooth boundaries, providing an intuitive and stable parameterization for view-dependent effects. For diffuse appearance, SV achieves competitive results while keeping optimization simpler than existing alternatives. For reflections - where SH fail - we leverage SV as learnable reflection probes, taking reflected directions as input following principles from classical graphics. This formulation attains state-of-the-art results on synthetic and real-world datasets, demonstrating that SV offers a principled, efficient, and general solution for appearance modeling in explicit 3D representations.
Boost Your NeRF: A Model-Agnostic Mixture of Experts Framework for High Quality and Efficient Rendering
Jul 15, 2024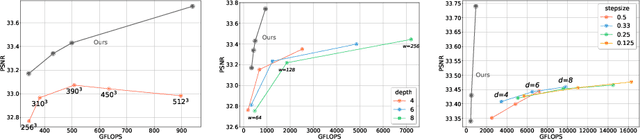


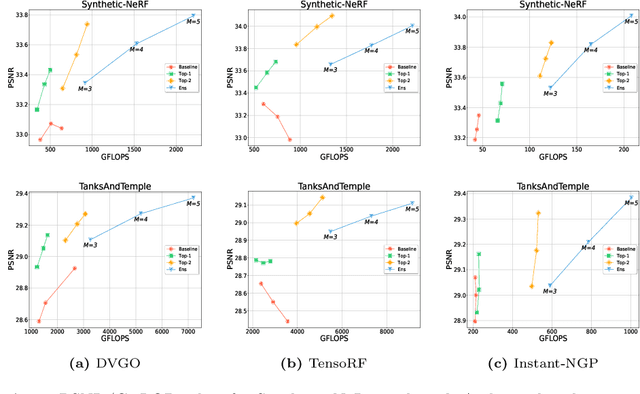
Since the introduction of NeRFs, considerable attention has been focused on improving their training and inference times, leading to the development of Fast-NeRFs models. Despite demonstrating impressive rendering speed and quality, the rapid convergence of such models poses challenges for further improving reconstruction quality. Common strategies to improve rendering quality involves augmenting model parameters or increasing the number of sampled points. However, these computationally intensive approaches encounter limitations in achieving significant quality enhancements. This study introduces a model-agnostic framework inspired by Sparsely-Gated Mixture of Experts to enhance rendering quality without escalating computational complexity. Our approach enables specialization in rendering different scene components by employing a mixture of experts with varying resolutions. We present a novel gate formulation designed to maximize expert capabilities and propose a resolution-based routing technique to effectively induce sparsity and decompose scenes. Our work significantly improves reconstruction quality while maintaining competitive performance.
Cloud-based user modeling for social robots: a first attempt
Sep 25, 2022
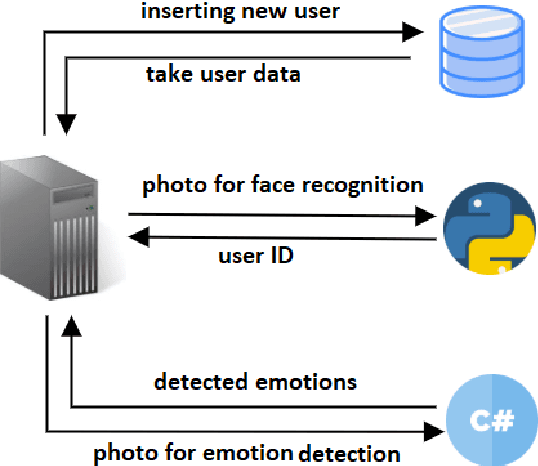
A social robot is an autonomous robot that interact with people by engaging in social emotive behaviors, skills, capacities, and rules attached to its collaborative role. In order to achieve these goals we believe that modeling the interaction with the user and adapt the robot behavior to the user herself are fundamental for its social role. This paper presents our first attempt to integrate user modeling features in social and affective robots. We propose a cloud-based architecture for modeling the user-robot interaction in order to reuse the approach with different kind of social robots.