 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the usability of generative AI: Human generative AI
Feb 24, 2025Generative AI systems are transforming content creation, but their usability remains a key challenge. This paper examines usability factors such as user experience, transparency, control, and cognitive load. Common challenges include unpredictability and difficulties in fine-tuning outputs. We review evaluation metrics like efficiency, learnability, and satisfaction, highlighting best practices from various domains. Improving interpretability, intuitive interfaces, and user feedback can enhance usability, making generative AI more accessible and effective.
How personality and memory of a robot can influence user modeling in Human-Robot Interaction
Jun 15, 2024


In recent years, robotics has evolved, placing robots in social contexts, and giving rise to Human-Robot Interaction (HRI). HRI aims to improve user satisfaction by designing autonomous social robots with user modeling functionalities and user-adapted interactions, storing data on people to achieve personalized interactions. Personality, a vital factor in human interactions, influences temperament, social preferences, and cognitive abilities. Despite much research on personality traits influencing human-robot interactions, little attention has been paid to the influence of the robot's personality on the user model. Personality can influence not only temperament and how people interact with each other but also what they remember about an interaction or the person they interact with. A robot's personality traits could therefore influence what it remembers about the user and thus modify the user model and the consequent interactions. However, no studies investigating such conditioning have been found. This paper addresses this gap by proposing distinct user models that reflect unique robotic personalities, exploring the interplay between individual traits, memory, and social interactions to replicate human-like processes, providing users with more engaging and natural experiences
Can empathy affect the attribution of mental states to robots?
Sep 06, 2023
This paper presents an experimental study showing that the humanoid robot NAO, in a condition already validated with regards to its capacity to trigger situational empathy in humans, is able to stimulate the attribution of mental states towards itself. Indeed, results show that participants not only experienced empathy towards NAO, when the robot was afraid of losing its memory due to a malfunction, but they also attributed higher scores to the robot emotional intelligence in the Attribution of Mental State Questionnaire, in comparison with the users in the control condition. This result suggests a possible correlation between empathy toward the robot and humans' attribution of mental states to it.
Using the power of memes: The Pepper Robot as a communicative facilitator for autistic children
Aug 09, 2023This article describes the preliminary qualitative results of a therapeutic laboratory involving the Pepper robot, as a facilitator, to promote autonomy and functional acquisition in autistic children with low support needs (level 1 support). The lab, designed and led by a multidisciplinary team, involved 4 children, aged 11 to 13 years, and was organized in weekly meetings for the duration of four months. The following is the result of an in-depth qualitative evaluation of the interactions that took place between the children and the Pepper robot, with the aim of analyzing their effectiveness for the purpose of promoting the development of social and communication skills in the participants. The observations and analyses conducted during the interactions provided valuable insights into the dialogue and communication style employed and paved the way for possible strategies to make the robot more empathetic and engaging for autistic children.
From psychological traits to safety warnings: three studies on recommendations in a smart home environment
Jun 09, 2023In this paper, we report on three experiments we have carried out in the context of the EMPATHY project, with the aim of helping users make better configuration choices in a smart home environment, and discuss our results. We found that there are psychological traits, such as Need for Cognition, which influence the way individuals tend to use recommendations, that there are non obvious relationships between the perceived usefulness of recommendations in different domains and individuals' ability to exploit suggestions on configuration choices, and that detailed, easy-to-understand security explanations are more persuasive than simple security warnings, when it comes to make decisions on the applicability of rules which might cause privacy and security risks.
Preliminary results of a therapeutic lab for promoting autonomies in autistic children
May 04, 2023This extended abtract describes the preliminary qualitative results coming from a therapeutic laboratory focused on the use of the Pepper robot to promote autonomies and functional acquisitions in highly functioning (Asperger) children with autism. The field lab, ideated and led by a multidisciplinary team, involved 4 children, aged 11-13, who attended the laboratory sessions once a week for four months.
Employing Socially Assistive Robots in Elderly Care (longer version)
Apr 28, 2023Recently, it has been considering robotics to face world population aging. According to the WHO, in 2050 there will be about 2.1 billion people over 60 years old worldwide causing a persistent growing need of assistance and a shortage of manpower for delivering congruous assistance. Therefore, seniors' QoL is continuously threatened. Socially Assistive Robotics proposes itself as a solution. To improve SARs acceptability, it is necessary to tailor the system's characteristics with respect to the target needs and issues through the analysis of previous and current studies in the HRI field. Through the examination of the state of the art of social robotics in elderly care, past case studies and paper research about SARs' efficiency, it has been proposed two potential solution examples for two different scenarios, applying two different SARs: Pepper and Nao robots.
Mental state attribution to educational robots: an experience with children in primary school
Mar 07, 2023The work presented in this paper was carried out in the context of the project Girls and boys: one day at university promoted by the City of Turin together with the University of Turin. We were responsible for two educational activities on robotics and coding hosted at the Computer Science Department, which made one of its laboratories available for this kind of lesson. At the conclusion of the lab's sessions, children compiled the Attribution of Mental State (AMS) questionnaire, which is a measure of mental states that participants attribute to robots, namely the user's perception of the robot's mental qualities as compared to humans. We distributed the questionnaires both to children attending the educational robotics lab and to children performing coding activities. Results show that the first group attributed higher mental qualities to the robots, compared to the attribution given by children that did not have a direct experience with a robot.
Cloud-based user modeling for social robots: a first attempt
Sep 25, 2022
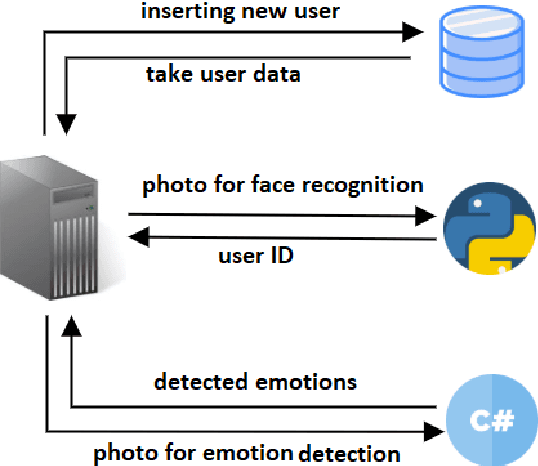
A social robot is an autonomous robot that interact with people by engaging in social emotive behaviors, skills, capacities, and rules attached to its collaborative role. In order to achieve these goals we believe that modeling the interaction with the user and adapt the robot behavior to the user herself are fundamental for its social role. This paper presents our first attempt to integrate user modeling features in social and affective robots. We propose a cloud-based architecture for modeling the user-robot interaction in order to reuse the approach with different kind of social robots.
Social Assistive Robotics for Autistic Children
Sep 25, 2022
This paper introduces the project Social Assistive Robotics for Autistic Children aimed at using robotic therapy for autism. The goal of the project is testing autistic children's interactions with the social robot NAO. In particular the robot will support the operators (psychologists, educators, speech therapists etc.) in their work. The innovative aspect of the project is that the children robot interaction will consider the children's emotions and specific features and the robot will adapt its behavior accordingly.