 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom psychological traits to safety warnings: three studies on recommendations in a smart home environment
Jun 09, 2023In this paper, we report on three experiments we have carried out in the context of the EMPATHY project, with the aim of helping users make better configuration choices in a smart home environment, and discuss our results. We found that there are psychological traits, such as Need for Cognition, which influence the way individuals tend to use recommendations, that there are non obvious relationships between the perceived usefulness of recommendations in different domains and individuals' ability to exploit suggestions on configuration choices, and that detailed, easy-to-understand security explanations are more persuasive than simple security warnings, when it comes to make decisions on the applicability of rules which might cause privacy and security risks.
Preliminary results of a therapeutic lab for promoting autonomies in autistic children
May 04, 2023This extended abtract describes the preliminary qualitative results coming from a therapeutic laboratory focused on the use of the Pepper robot to promote autonomies and functional acquisitions in highly functioning (Asperger) children with autism. The field lab, ideated and led by a multidisciplinary team, involved 4 children, aged 11-13, who attended the laboratory sessions once a week for four months.
Cloud-based user modeling for social robots: a first attempt
Sep 25, 2022
A social robot is an autonomous robot that interact with people by engaging in social emotive behaviors, skills, capacities, and rules attached to its collaborative role. In order to achieve these goals we believe that modeling the interaction with the user and adapt the robot behavior to the user herself are fundamental for its social role. This paper presents our first attempt to integrate user modeling features in social and affective robots. We propose a cloud-based architecture for modeling the user-robot interaction in order to reuse the approach with different kind of social robots.
Social Assistive Robotics for Autistic Children
Sep 25, 2022
This paper introduces the project Social Assistive Robotics for Autistic Children aimed at using robotic therapy for autism. The goal of the project is testing autistic children's interactions with the social robot NAO. In particular the robot will support the operators (psychologists, educators, speech therapists etc.) in their work. The innovative aspect of the project is that the children robot interaction will consider the children's emotions and specific features and the robot will adapt its behavior accordingly.
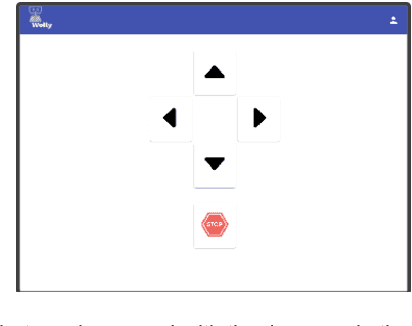
An affective and adaptive educational robot
May 20, 2022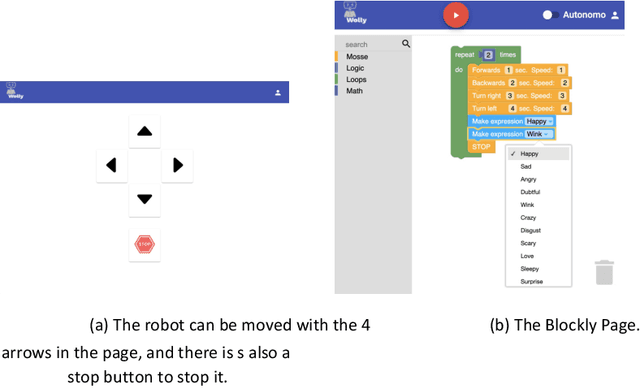
In this paper we present an educational robot called Wolly, designed to engage children in an affective and social interaction. Indeed, we are now focusing on its role as an educational and affective robot capable of being controlled by coding instructions and at the same time interacting verbally and affectively with children by recognizing their emotions and remembering their interests, and adapting its behavior accordingly.
Sugar, Salt & Pepper -- Humanoid robotics for autism
Mar 14, 2022
This paper introduces an experimental trial that will take place from February to June 2021, and which will see the use of the Pepper robot in a therapeutic laboratory on autonomies that will promote functional acquisitions in children diagnosed with high functioning autism/Asperger's syndrome.
Autistic Children's Mental Model of an Humanoid Robot
Mar 14, 2022This position paper introduces the results of an initial card sorting experiment based on the reactions and questions of a group of children with autism working with a humanoid robot in a therapeutic laboratory on autonomy.
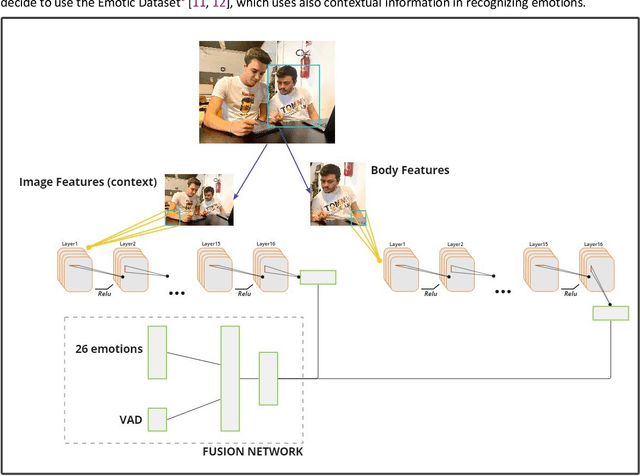
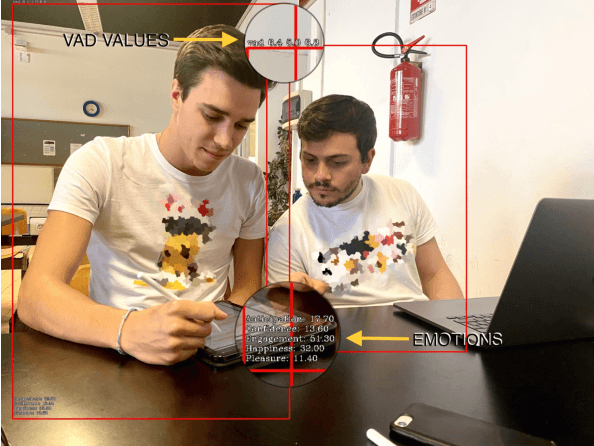
An end-user coding-based environment for programming an educational affective robot
Mar 12, 2022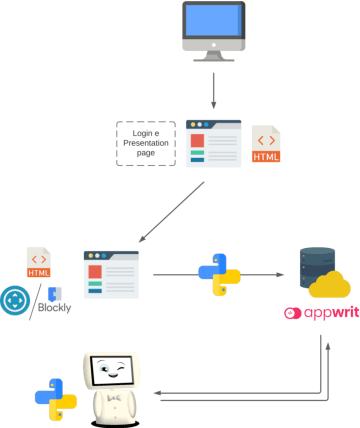
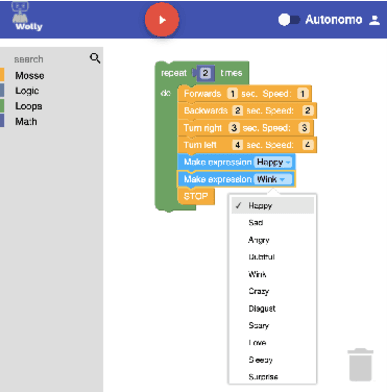
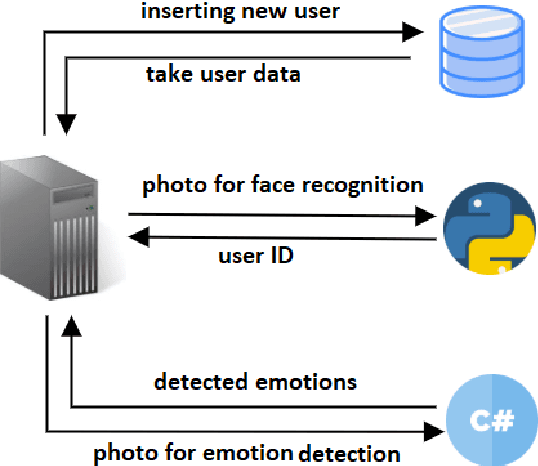
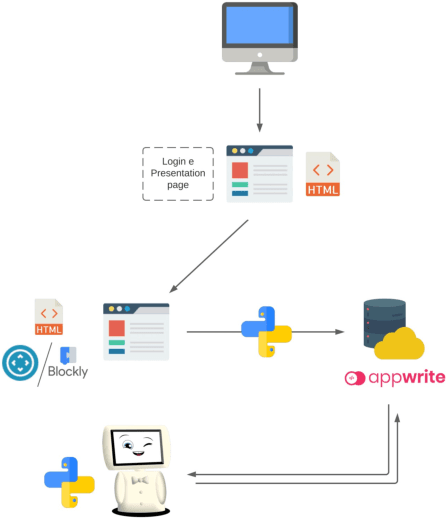
In this paper we present an open source educational robot, designed both to engage children in an affective and social interaction, and to be programmable also in its social and affective behaviour. Indeed the robot, in addition to classic programming tasks, can also be programmed as a social robot. In addition to movements, the user can make the robot express emotions and make it say things. The robot can also be left in autonomous mode, in which it is able to carry out both biometric user's features and emotion recognition, and greeting the user.
UX Personas for defining robot's character and personality
Mar 08, 2022This paper describes the use of UX Personas for defining a stable character for the Pepper robot. This approach generated from the first analysis of the social interactions that occurred between Pepper and a group of children with autism working with the robot in a therapeutic laboratory on autonomy.
User modeling for social and affective robots
Aug 05, 2021This paper presents our first attempt to integrate user modeling features in social and affective robots. We propose a cloud-based architecture for modeling the user-robot interaction in order to re-use the approach with different kind of social robots.