 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis over vision-based models for pedestrian action anticipation
May 27, 2023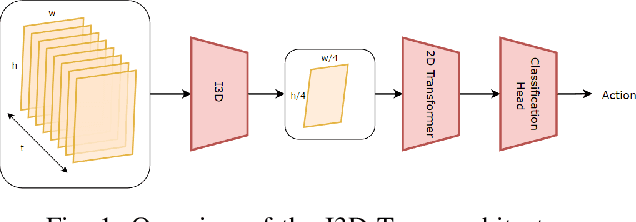
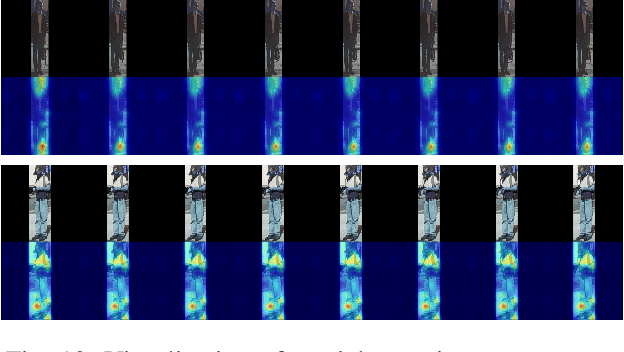
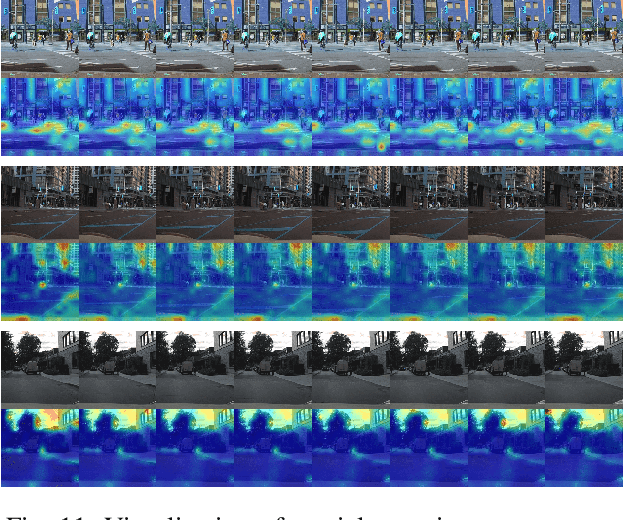
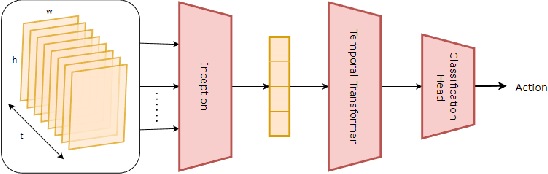
Anticipating human actions in front of autonomous vehicles is a challenging task. Several papers have recently proposed model architectures to address this problem by combining multiple input features to predict pedestrian crossing actions. This paper focuses specifically on using images of the pedestrian's context as an input feature. We present several spatio-temporal model architectures that utilize standard CNN and Transformer modules to serve as a backbone for pedestrian anticipation. However, the objective of this paper is not to surpass state-of-the-art benchmarks but rather to analyze the positive and negative predictions of these models. Therefore, we provide insights on the explainability of vision-based Transformer models in the context of pedestrian action prediction. We will highlight cases where the model can achieve correct quantitative results but falls short in providing human-like explanations qualitatively, emphasizing the importance of investing in explainability for pedestrian action anticipation problems.
A Variational Time Series Feature Extractor for Action Prediction
Sep 26, 2018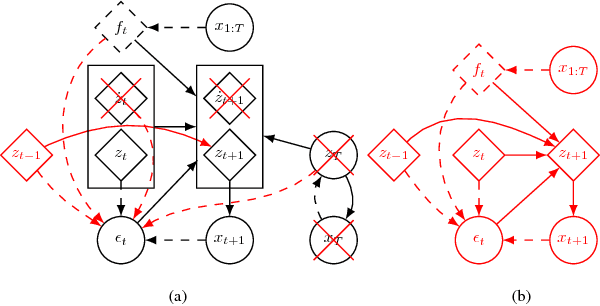
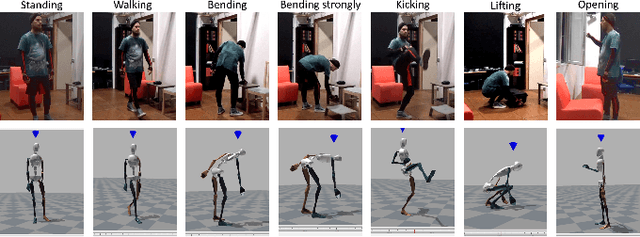
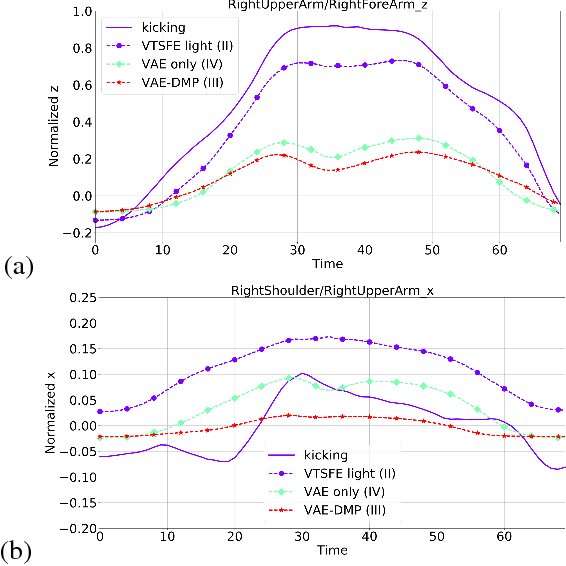
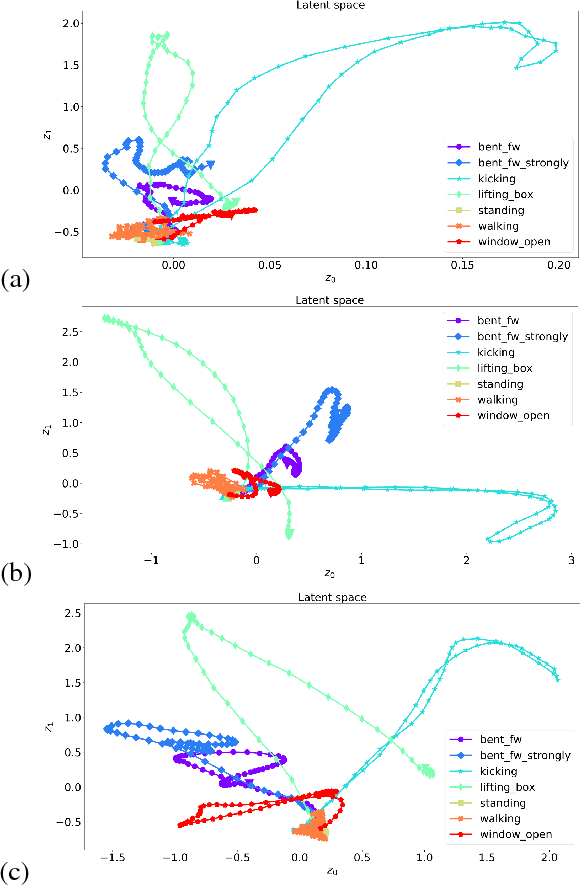
We propose a Variational Time Series Feature Extractor (VTSFE), inspired by the VAE-DMP model of Chen et al., to be used for action recognition and prediction. Our method is based on variational autoencoders. It improves VAE-DMP in that it has a better noise inference model, a simpler transition model constraining the acceleration in the trajectories of the latent space, and a tighter lower bound for the variational inference. We apply the method for classification and prediction of whole-body movements on a dataset with 7 tasks and 10 demonstrations per task, recorded with a wearable motion capture suit. The comparison with VAE and VAE-DMP suggests the better performance of our method for feature extraction. An open-source software implementation of each method with TensorFlow is also provided. In addition, a more detailed version of this work can be found in the indicated code repository. Although it was meant to, the VTSFE hasn't been tested for action prediction, due to a lack of time in the context of Maxime Chaveroche's Master thesis at INRIA.
Comparison of Selection Methods in On-line Distributed Evolutionary Robotics
Jan 07, 2015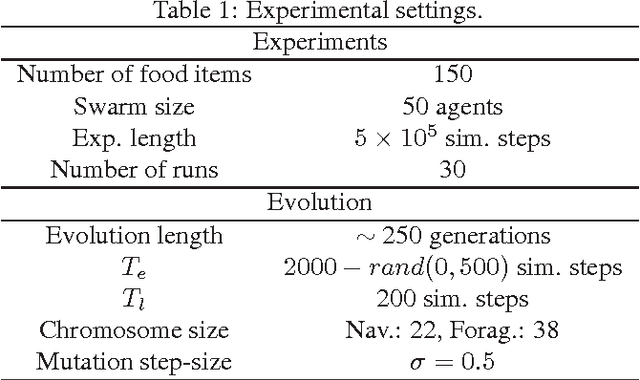
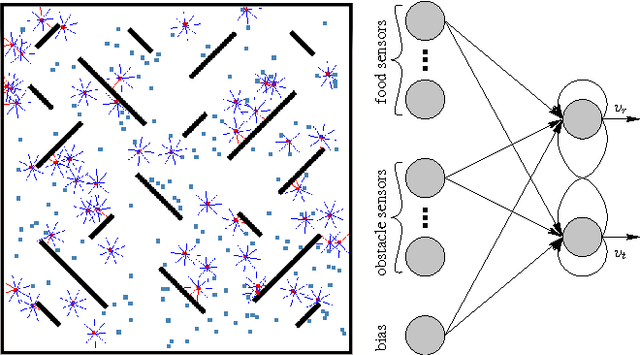
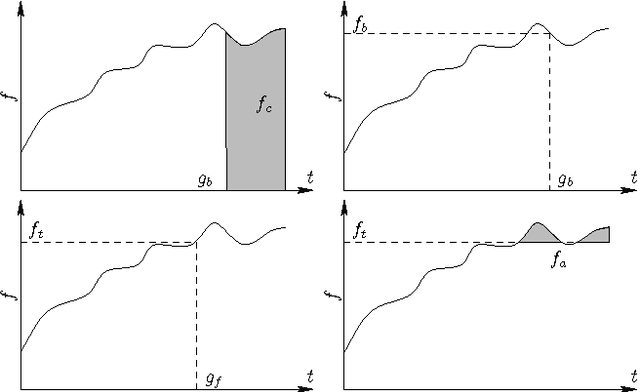
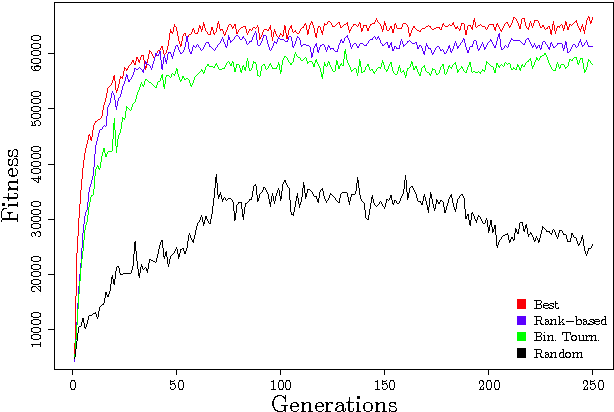
In this paper, we study the impact of selection methods in the context of on-line on-board distributed evolutionary algorithms. We propose a variant of the mEDEA algorithm in which we add a selection operator, and we apply it in a taskdriven scenario. We evaluate four selection methods that induce different intensity of selection pressure in a multi-robot navigation with obstacle avoidance task and a collective foraging task. Experiments show that a small intensity of selection pressure is sufficient to rapidly obtain good performances on the tasks at hand. We introduce different measures to compare the selection methods, and show that the higher the selection pressure, the better the performances obtained, especially for the more challenging food foraging task.
Multi-Sensor Fusion Method using Dynamic Bayesian Network for Precise Vehicle Localization and Road Matching
Sep 07, 2007
This paper presents a multi-sensor fusion strategy for a novel road-matching method designed to support real-time navigational features within advanced driving-assistance systems. Managing multihypotheses is a useful strategy for the road-matching problem. The multi-sensor fusion and multi-modal estimation are realized using Dynamical Bayesian Network. Experimental results, using data from Antilock Braking System (ABS) sensors, a differential Global Positioning System (GPS) receiver and an accurate digital roadmap, illustrate the performances of this approach, especially in ambiguous situations.
Mixed Integer Linear Programming For Exact Finite-Horizon Planning In Decentralized Pomdps
Jul 17, 2007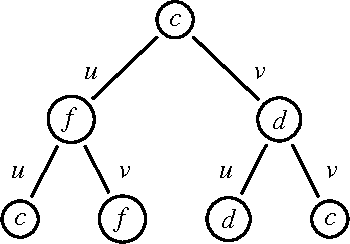
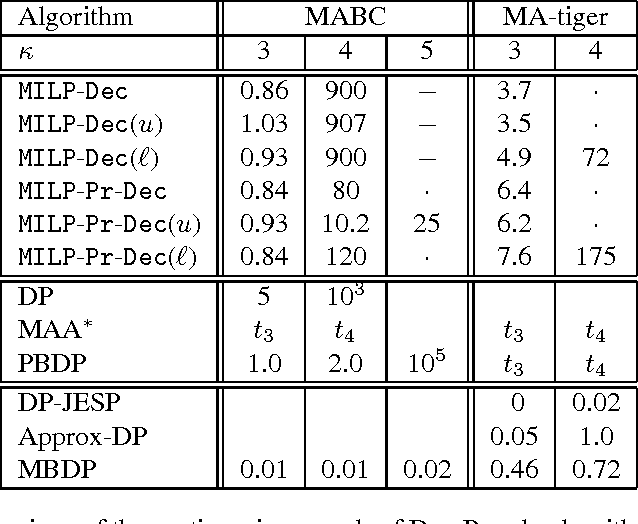
We consider the problem of finding an n-agent joint-policy for the optimal finite-horizon control of a decentralized Pomdp (Dec-Pomdp). This is a problem of very high complexity (NEXP-hard in n >= 2). In this paper, we propose a new mathematical programming approach for the problem. Our approach is based on two ideas: First, we represent each agent's policy in the sequence-form and not in the tree-form, thereby obtaining a very compact representation of the set of joint-policies. Second, using this compact representation, we solve this problem as an instance of combinatorial optimization for which we formulate a mixed integer linear program (MILP). The optimal solution of the MILP directly yields an optimal joint-policy for the Dec-Pomdp. Computational experience shows that formulating and solving the MILP requires significantly less time to solve benchmark Dec-Pomdp problems than existing algorithms. For example, the multi-agent tiger problem for horizon 4 is solved in 72 secs with the MILP whereas existing algorithms require several hours to solve it.
Markerless Human Motion Capture for Gait Analysis
Oct 21, 2005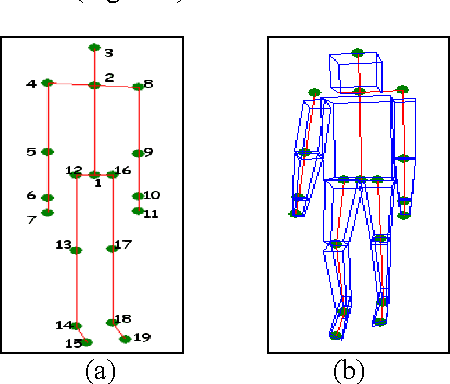
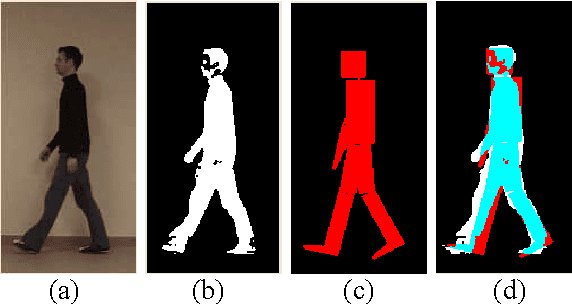


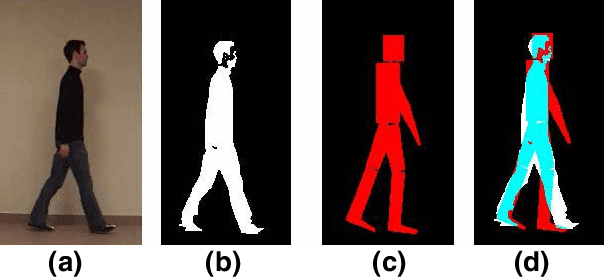
The aim of our study is to detect balance disorders and a tendency towards the falls in the elderly, knowing gait parameters. In this paper we present a new tool for gait analysis based on markerless human motion capture, from camera feeds. The system introduced here, recovers the 3D positions of several key points of the human body while walking. Foreground segmentation, an articulated body model and particle filtering are basic elements of our approach. No dynamic model is used thus this system can be described as generic and simple to implement. A modified particle filtering algorithm, which we call Interval Particle Filtering, is used to reorganise and search through the model's configurations search space in a deterministic optimal way. This algorithm was able to perform human movement tracking with success. Results from the treatment of a single cam feeds are shown and compared to results obtained using a marker based human motion capture system.
Using Interval Particle Filtering for Marker less 3D Human Motion Capture
Oct 21, 2005

In this paper we present a new approach for marker less human motion capture from conventional camera feeds. The aim of our study is to recover 3D positions of key points of the body that can serve for gait analysis. Our approach is based on foreground segmentation, an articulated body model and particle filters. In order to be generic and simple no restrictive dynamic modelling was used. A new modified particle filtering algorithm was introduced. It is used efficiently to search the model configuration space. This new algorithm which we call Interval Particle Filtering reorganizes the configurations search space in an optimal deterministic way and proved to be efficient in tracking natural human movement. Results for human motion capture from a single camera are presented and compared to results obtained from a marker based system. The system proved to be able to track motion successfully even in partial occlusions.