 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Investigation into Mathematical Programming for Finite Horizon Decentralized POMDPs
Jan 16, 2014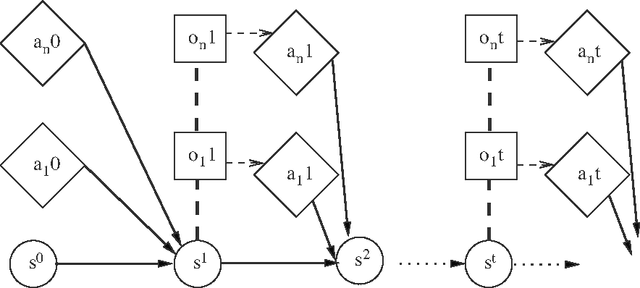
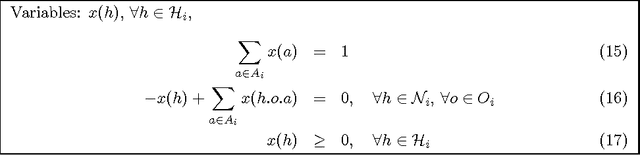
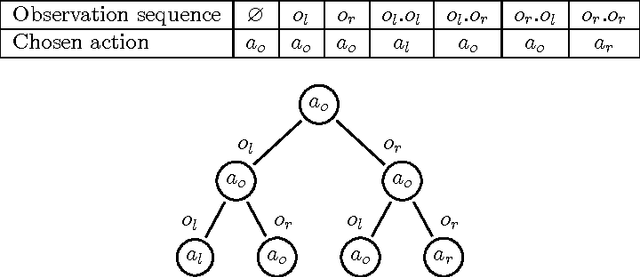
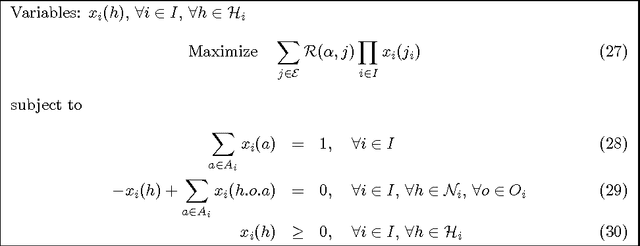
Decentralized planning in uncertain environments is a complex task generally dealt with by using a decision-theoretic approach, mainly through the framework of Decentralized Partially Observable Markov Decision Processes (DEC-POMDPs). Although DEC-POMDPS are a general and powerful modeling tool, solving them is a task with an overwhelming complexity that can be doubly exponential. In this paper, we study an alternate formulation of DEC-POMDPs relying on a sequence-form representation of policies. From this formulation, we show how to derive Mixed Integer Linear Programming (MILP) problems that, once solved, give exact optimal solutions to the DEC-POMDPs. We show that these MILPs can be derived either by using some combinatorial characteristics of the optimal solutions of the DEC-POMDPs or by using concepts borrowed from game theory. Through an experimental validation on classical test problems from the DEC-POMDP literature, we compare our approach to existing algorithms. Results show that mathematical programming outperforms dynamic programming but is less efficient than forward search, except for some particular problems. The main contributions of this work are the use of mathematical programming for DEC-POMDPs and a better understanding of DEC-POMDPs and of their solutions. Besides, we argue that our alternate representation of DEC-POMDPs could be helpful for designing novel algorithms looking for approximate solutions to DEC-POMDPs.
Mixed Integer Linear Programming For Exact Finite-Horizon Planning In Decentralized Pomdps
Jul 17, 2007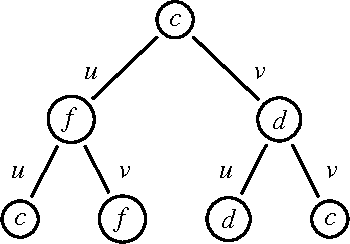
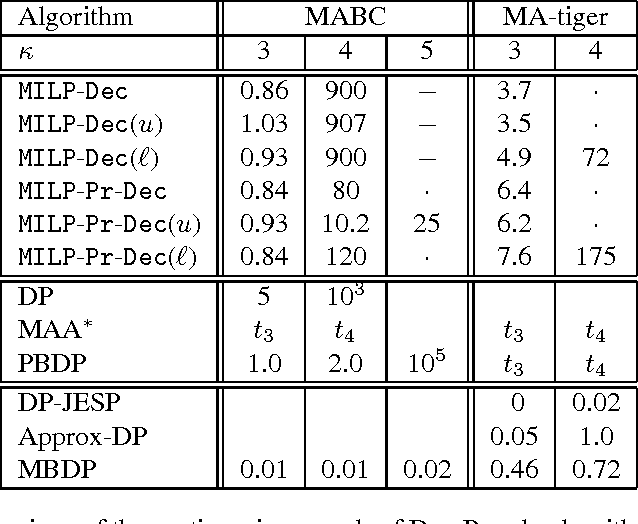
We consider the problem of finding an n-agent joint-policy for the optimal finite-horizon control of a decentralized Pomdp (Dec-Pomdp). This is a problem of very high complexity (NEXP-hard in n >= 2). In this paper, we propose a new mathematical programming approach for the problem. Our approach is based on two ideas: First, we represent each agent's policy in the sequence-form and not in the tree-form, thereby obtaining a very compact representation of the set of joint-policies. Second, using this compact representation, we solve this problem as an instance of combinatorial optimization for which we formulate a mixed integer linear program (MILP). The optimal solution of the MILP directly yields an optimal joint-policy for the Dec-Pomdp. Computational experience shows that formulating and solving the MILP requires significantly less time to solve benchmark Dec-Pomdp problems than existing algorithms. For example, the multi-agent tiger problem for horizon 4 is solved in 72 secs with the MILP whereas existing algorithms require several hours to solve it.