 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne Stack to Rule them All: To Drive Automated Vehicles, and Reach for the 4th level
Apr 03, 2024



Most automated driving functions are designed for a specific task or vehicle. Most often, the underlying architecture is fixed to specific algorithms to increase performance. Therefore, it is not possible to deploy new modules and algorithms easily. In this paper, we present our automated driving stack which combines both scalability and adaptability. Due to the modular design, our stack allows for a fast integration and testing of novel and state-of-the-art research approaches. Furthermore, it is flexible to be used for our different testing vehicles, including modified EasyMile EZ10 shuttles and different passenger cars. These vehicles differ in multiple ways, e.g. sensor setups, control systems, maximum speed, or steering angle limitations. Finally, our stack is deployed in real world environments, including passenger transport in urban areas. Our stack includes all components needed for operating an autonomous vehicle, including localization, perception, planning, controller, and additional safety modules. Our stack is developed, tested, and evaluated in real world traffic in multiple test sites, including the Test Area Autonomous Driving Baden-W\"urttemberg.
Adaptive Behavior Generation for Autonomous Driving using Deep Reinforcement Learning with Compact Semantic States
Sep 10, 2018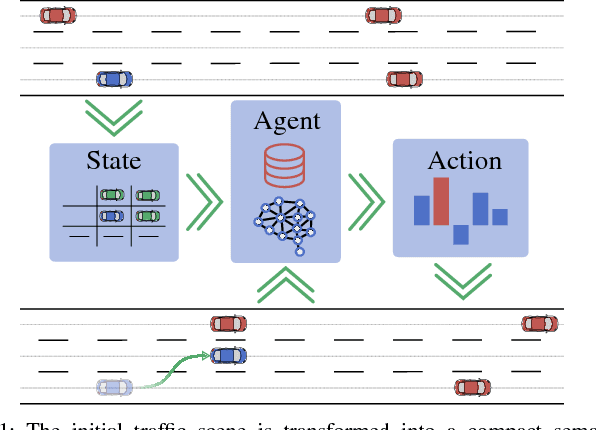
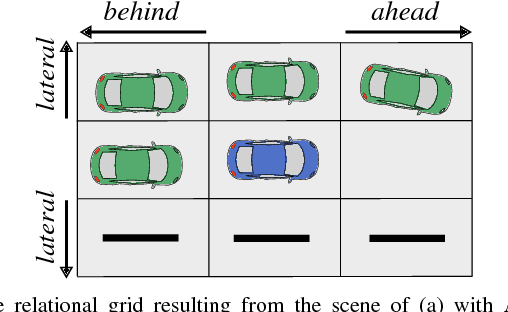
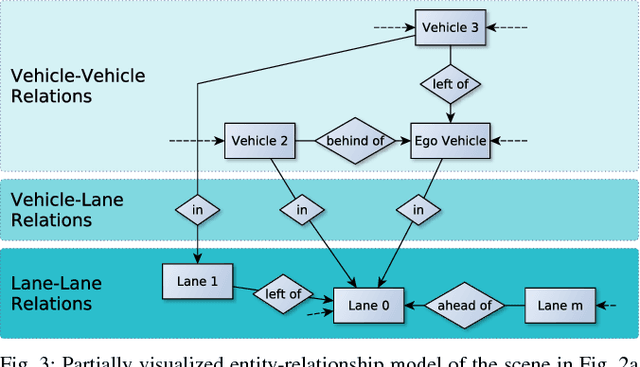
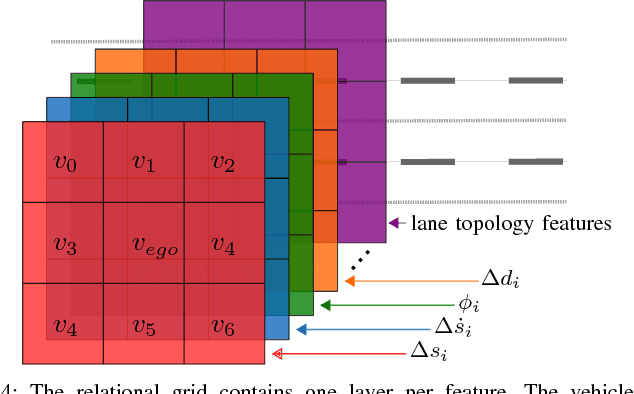
Making the right decision in traffic is a challenging task that is highly dependent on individual preferences as well as the surrounding environment. Therefore it is hard to model solely based on expert knowledge. In this work we use Deep Reinforcement Learning to learn maneuver decisions based on a compact semantic state representation. This ensures a consistent model of the environment across scenarios as well as a behavior adaptation function, enabling on-line changes of desired behaviors without re-training. The input for the neural network is a simulated object list similar to that of Radar or Lidar sensors, superimposed by a relational semantic scene description. The state as well as the reward are extended by a behavior adaptation function and a parameterization respectively. With little expert knowledge and a set of mid-level actions, it can be seen that the agent is capable to adhere to traffic rules and learns to drive safely in a variety of situations.