 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMasked Generative Policy for Robotic Control
Dec 09, 2025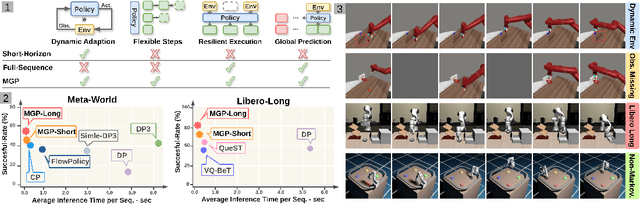
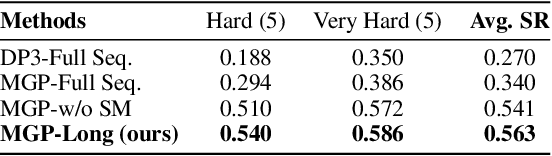
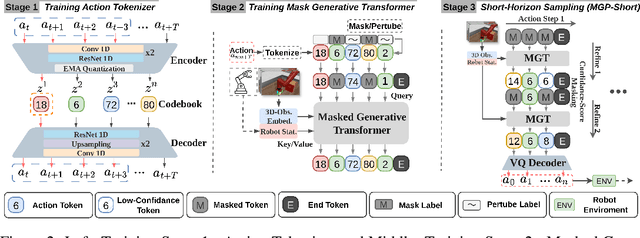

We present Masked Generative Policy (MGP), a novel framework for visuomotor imitation learning. We represent actions as discrete tokens, and train a conditional masked transformer that generates tokens in parallel and then rapidly refines only low-confidence tokens. We further propose two new sampling paradigms: MGP-Short, which performs parallel masked generation with score-based refinement for Markovian tasks, and MGP-Long, which predicts full trajectories in a single pass and dynamically refines low-confidence action tokens based on new observations. With globally coherent prediction and robust adaptive execution capabilities, MGP-Long enables reliable control on complex and non-Markovian tasks that prior methods struggle with. Extensive evaluations on 150 robotic manipulation tasks spanning the Meta-World and LIBERO benchmarks show that MGP achieves both rapid inference and superior success rates compared to state-of-the-art diffusion and autoregressive policies. Specifically, MGP increases the average success rate by 9% across 150 tasks while cutting per-sequence inference time by up to 35x. It further improves the average success rate by 60% in dynamic and missing-observation environments, and solves two non-Markovian scenarios where other state-of-the-art methods fail.
3D-ADAM: A Dataset for 3D Anomaly Detection in Advanced Manufacturing
Jul 10, 2025Surface defects are one of the largest contributors to low yield in the manufacturing sector. Accurate and reliable detection of defects during the manufacturing process is therefore of great value across the sector. State-of-the-art approaches to automated defect detection yield impressive performance on current datasets, yet still fall short in real-world manufacturing settings and developing improved methods relies on large datasets representative of real-world scenarios. Unfortunately, high-quality, high-precision RGB+3D industrial anomaly detection datasets are scarce, and typically do not reflect real-world industrial deployment scenarios. To address this, we introduce 3D-ADAM, the first large-scale industry-relevant dataset for high-precision 3D Anomaly Detection. 3D-ADAM comprises 14,120 high-resolution scans across 217 unique parts, captured using 4 industrial depth imaging sensors. It includes 27,346 annotated defect instances from 12 categories, covering the breadth of industrial surface defects. 3D-ADAM uniquely captures an additional 8,110 annotations of machine element features, spanning the range of relevant mechanical design form factors. Unlike existing datasets, 3D-ADAM is captured in a real industrial environment with variations in part position and orientation, camera positioning, ambient lighting conditions, as well as partial occlusions. Our evaluation of SOTA models across various RGB+3D anomaly detection tasks demonstrates the significant challenge this dataset presents to current approaches. We further validated the industrial relevance and quality of the dataset through an expert labelling survey conducted by industry partners. By providing this challenging benchmark, 3D-ADAM aims to accelerate the development of robust 3D Anomaly Detection models capable of meeting the demands of modern manufacturing environments.
Curio: A Cost-Effective Solution for Robotics Education
May 24, 2025Student engagement is one of the key challenges in robotics and artificial intelligence (AI) education. Tangible learning approaches, such as educational robots, provide an effective way to enhance engagement and learning by offering real-world applications to bridge the gap between theory and practice. However, existing platforms often face barriers such as high cost or limited capabilities. In this paper, we present Curio, a cost-effective, smartphone-integrated robotics platform designed to lower the entry barrier to robotics and AI education. With a retail price below $50, Curio is more affordable than similar platforms. By leveraging smartphones, Curio eliminates the need for onboard processing units, dedicated cameras, and additional sensors while maintaining the ability to perform AI-based tasks. To evaluate the impact of Curio on student engagement, we conducted a case study with 20 participants, where we examined usability, engagement, and potential for integrating into AI and robotics education. The results indicate high engagement and motivation levels across all participants. Additionally, 95% of participants reported an improvement in their understanding of robotics. Findings suggest that using a robotic system such as Curio can enhance engagement and hands-on learning in robotics and AI education. All resources and projects with Curio are available at trycurio.com.
Can Real-to-Sim Approaches Capture Dynamic Fabric Behavior for Robotic Fabric Manipulation?
Mar 20, 2025This paper presents a rigorous evaluation of Real-to-Sim parameter estimation approaches for fabric manipulation in robotics. The study systematically assesses three state-of-the-art approaches, namely two differential pipelines and a data-driven approach. We also devise a novel physics-informed neural network approach for physics parameter estimation. These approaches are interfaced with two simulations across multiple Real-to-Sim scenarios (lifting, wind blowing, and stretching) for five different fabric types and evaluated on three unseen scenarios (folding, fling, and shaking). We found that the simulation engines and the choice of Real-to-Sim approaches significantly impact fabric manipulation performance in our evaluation scenarios. Moreover, PINN observes superior performance in quasi-static tasks but shows limitations in dynamic scenarios.
IMMERTWIN: A Mixed Reality Framework for Enhanced Robotic Arm Teleoperation
Sep 13, 2024
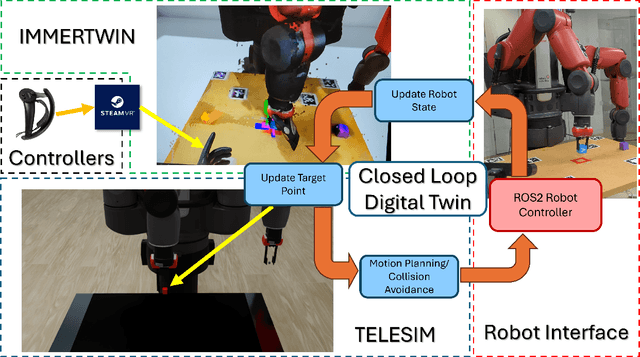
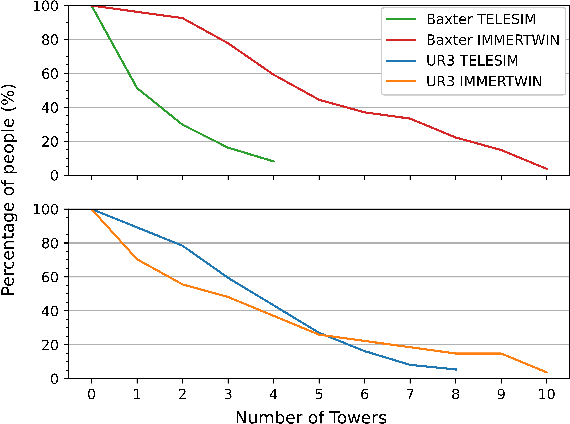
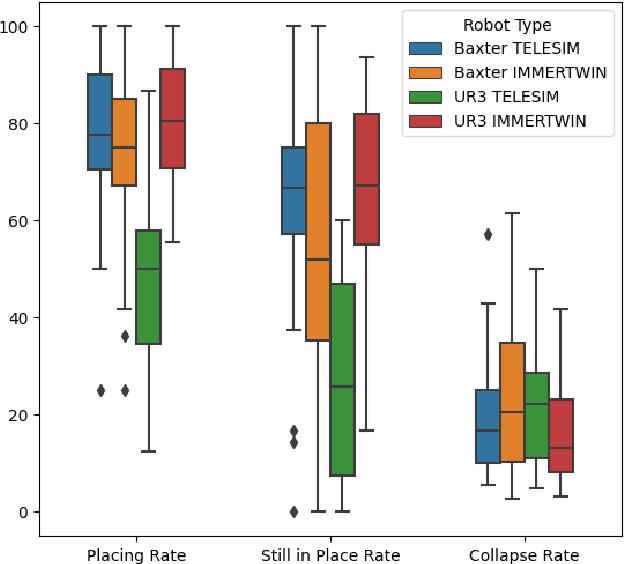
We present IMMERTWIN, a mixed reality framework for enhance robotic arm teleoperation using a closed-loop digital twin as a bridge for interaction between the user and the robotic system. We evaluated IMMERTWIN by performing a medium-scale user survey with 26 participants on two robots. Users were asked to teleoperate with both robots inside the virtual environment to pick and place 3 cubes in a tower and to repeat this task as many times as possible in 10 minutes, with only 5 minutes of training beforehand. Our experimental results show that most users were able to succeed by building at least a tower of 3 cubes regardless of the robot used and a maximum of 10 towers (1 tower per minute). In addition, users preferred to use IMMERTWIN over our previous work, TELESIM, as it caused them less mental workload. The project website and source code can be found at: https://cvas-ug.github.io/immertwin
A Systematic Comparison of Simulation Software for Robotic Arm Manipulation using ROS2
Apr 13, 2022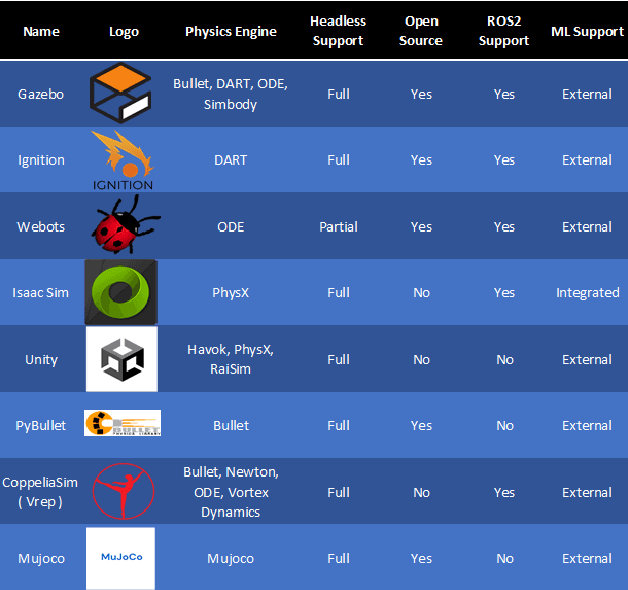
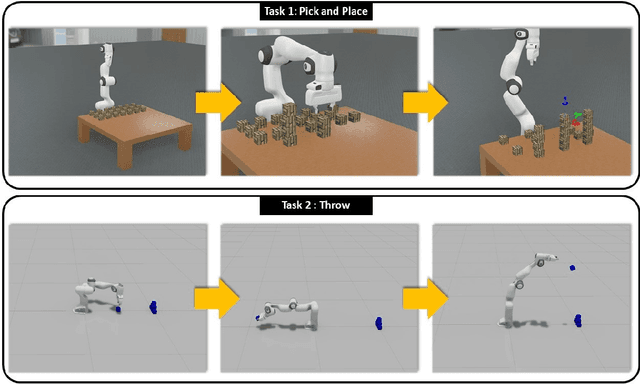
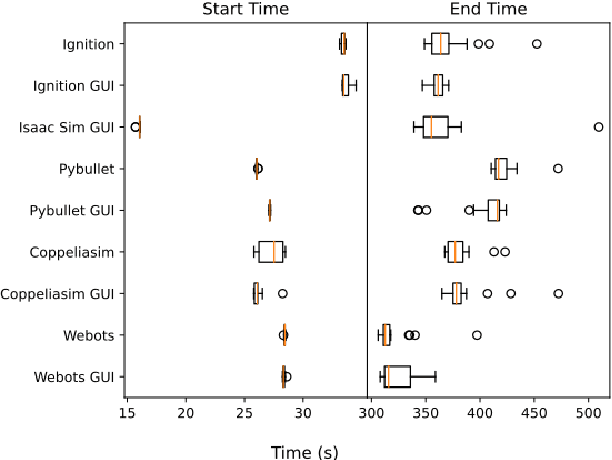
Simulation software is a powerful tool for robotics research, allowing the virtual representation of the real world. However with the rise of the Robot Operating System (ROS), there are new simulation software packages that have not been compared within the literature. This paper proposes a systematic review of simulation software that are compatible with ROS version 2. The focus is research in robotics arm manipulation as it represents the most often used robotic application in industry and their future applicability to digital twins. For this, we thus benchmark simulation software under similar parameters, tasks and scenarios, and evaluate them in terms of their capability for long-term operations, success at completing a task, repeatability and resource usage. We find that there is no best simulation software overall, but two simulation packages (Ignition and Webots) have higher stability than other while, in terms of resources usage, PyBullet and Coppeliasim consume less than their competitors.