 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreaking Down the Barriers: Investigating Non-Expert User Experiences in Robotic Teleoperation in UK and Japan
Oct 24, 2024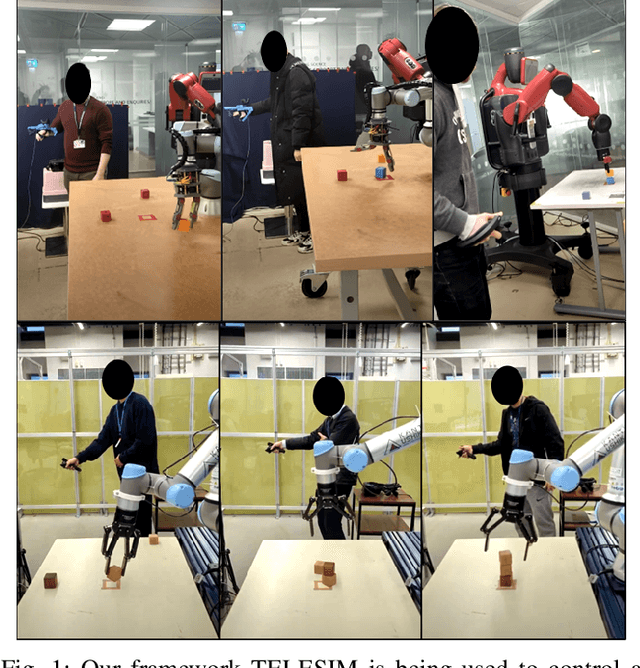
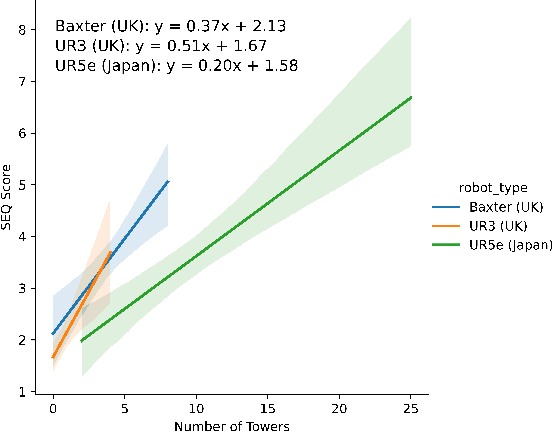
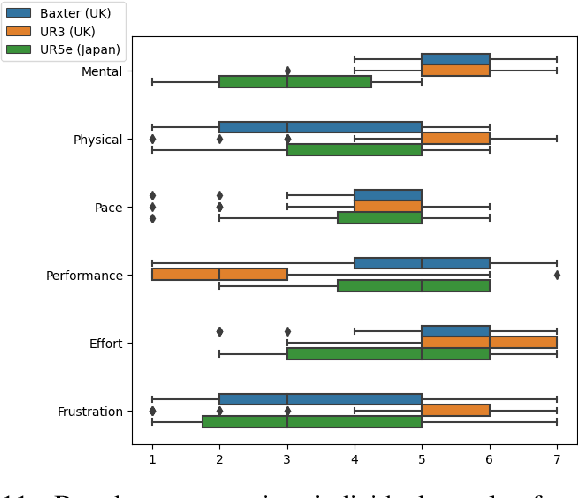
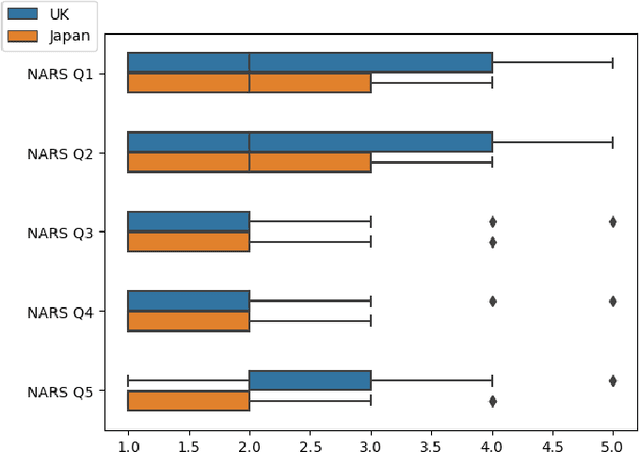
Robots are being created each year with the goal of integrating them into our daily lives. As such, there is an interest in research in evaluating the trust of humans toward robots. In addition, teleoperating robotic arms can be challenging for non-experts. In order to reduce the strain put on the user, we created TELESIM, a modular and plug-and-play framework that enables direct teleoperation of any robotic arm using a digital twin as the interface between users and the robotic system. However, analysis of the strain put on the user and its ability to trust robots was omitted. This paper addresses these omissions by presenting the additional results of our user survey of 37 participants carried out in UK. In addition, we present the results of an additional user survey, under similar conditions performed in Japan, with the goal of addressing the limitations of our previous approach, by interfacing a VR controller with a UR5e. Our experimental results show that the UR5e has a higher number of towers built. Additionally, the UR5e gives the least amount of cognitive stress, while the combination of Senseglove and UR3 gives the user the highest physical strain and causes the user to feel more frustrated. Finally, Japanese seems more trusting towards robots than British.
TELESIM: A Modular and Plug-and-Play Framework for Robotic Arm Teleoperation using a Digital Twin
Sep 20, 2023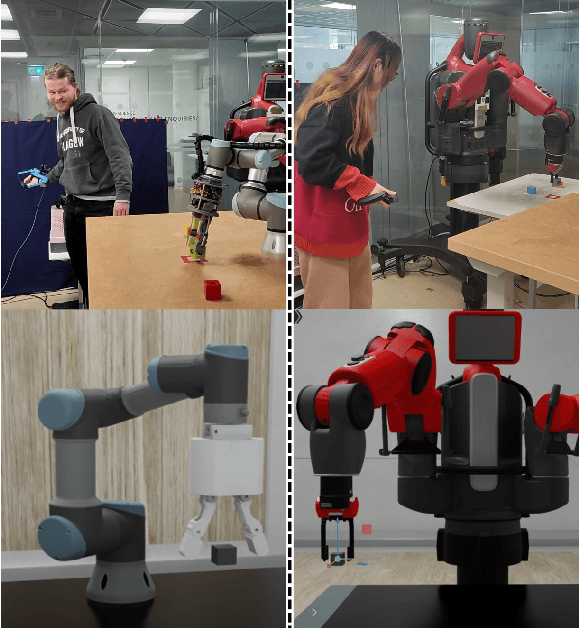
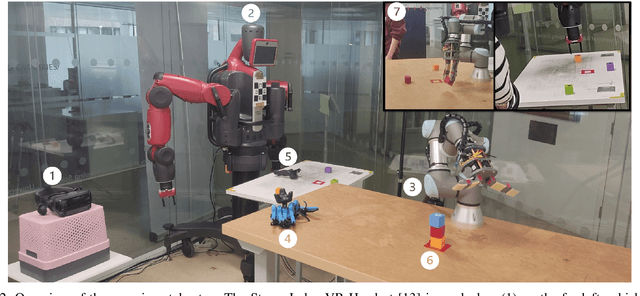
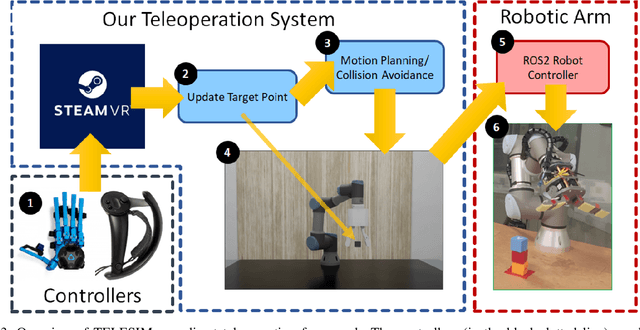
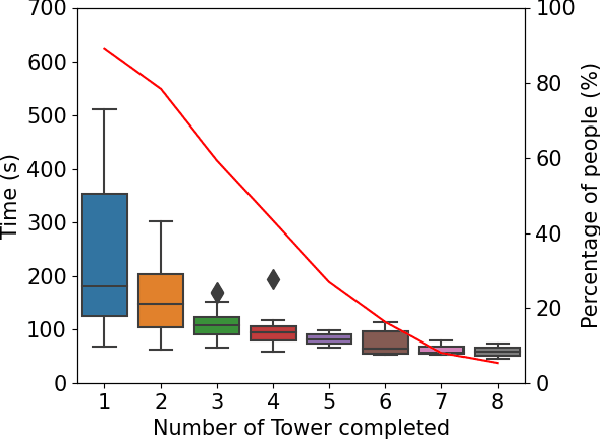
We present TELESIM, a modular and plug-and-play framework for direct teleoperation of a robotic arm using a digital twin as the interface between the user and the robotic system. We tested TELESIM by performing a user survey with 37 participants on two different robots using two different control modalities: a virtual reality controller and a finger mapping hardware controller using different grasping systems. Users were asked to teleoperate the robot to pick and place 3 cubes in a tower and to repeat this task as many times as possible in 10 minutes, with only 5 minutes of training beforehand. Our experimental results show that most users were able to succeed by building at least a tower of 3 cubes regardless of the control modality or robot used, demonstrating the user-friendliness of TELESIM.
A Systematic Comparison of Simulation Software for Robotic Arm Manipulation using ROS2
Apr 13, 2022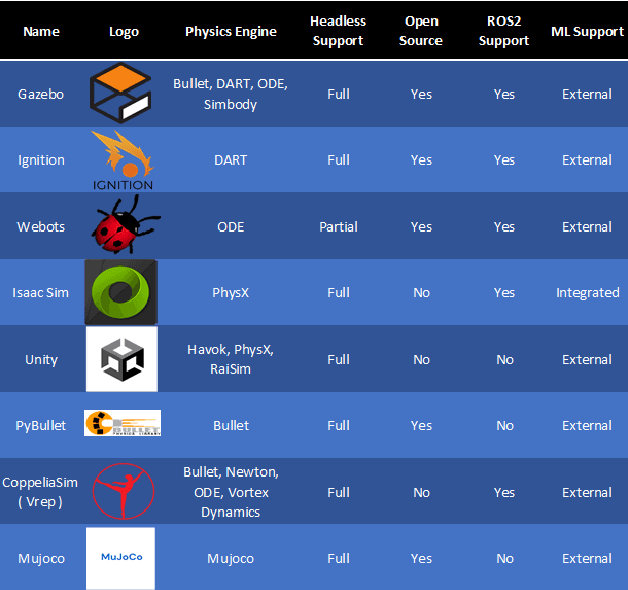
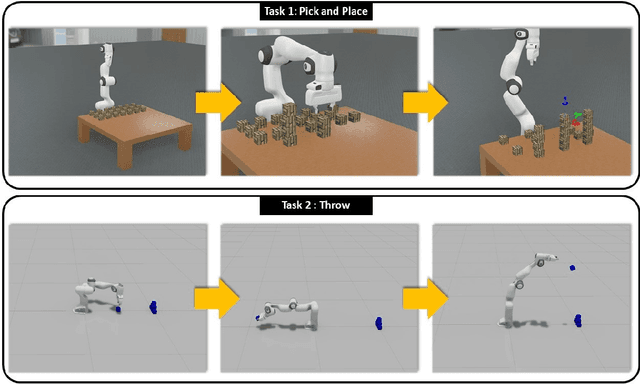
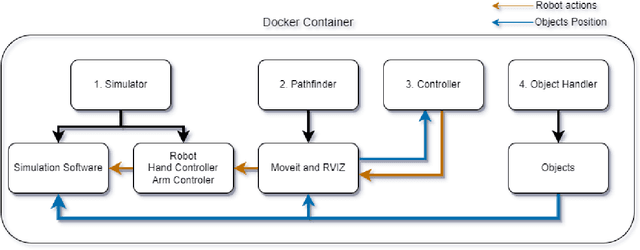
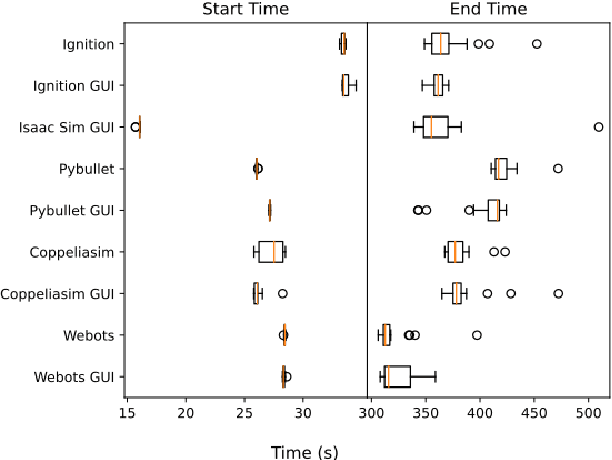
Simulation software is a powerful tool for robotics research, allowing the virtual representation of the real world. However with the rise of the Robot Operating System (ROS), there are new simulation software packages that have not been compared within the literature. This paper proposes a systematic review of simulation software that are compatible with ROS version 2. The focus is research in robotics arm manipulation as it represents the most often used robotic application in industry and their future applicability to digital twins. For this, we thus benchmark simulation software under similar parameters, tasks and scenarios, and evaluate them in terms of their capability for long-term operations, success at completing a task, repeatability and resource usage. We find that there is no best simulation software overall, but two simulation packages (Ignition and Webots) have higher stability than other while, in terms of resources usage, PyBullet and Coppeliasim consume less than their competitors.
Machine Learning Approach for Detection of nonTor Traffic
Aug 29, 2017
Intrusion detection has attracted a considerable interest from researchers and industries. After many years of research the community still faces the problem of building reliable and efficient intrusion detection systems (IDS) capable of handling large quantities of data with changing patterns in real time situations. The Tor network is popular in providing privacy and security to end user by anonymising the identity of internet users connecting through a series of tunnels and nodes. This work focuses on the classification of Tor traffic and nonTor traffic to expose the activities within Tor traffic that minimizes the protection of users. A study to compare the reliability and efficiency of Artificial Neural Network and Support vector machine in detecting nonTor traffic in UNB-CIC Tor Network Traffic dataset is presented in this paper. The results are analysed based on the overall accuracy, detection rate and false positive rate of the two algorithms. Experimental results show that both algorithms could detect nonTor traffic in the dataset. A hybrid Artificial neural network proved a better classifier than SVM in detecting nonTor traffic in UNB-CIC Tor Network Traffic dataset.
* 6 pages, 4 figures, Accepted and Presented in ARES '17 Proceedings of the 12th International Conference on Availability, Reliability and Security
Threat analysis of IoT networks Using Artificial Neural Network Intrusion Detection System
Apr 07, 2017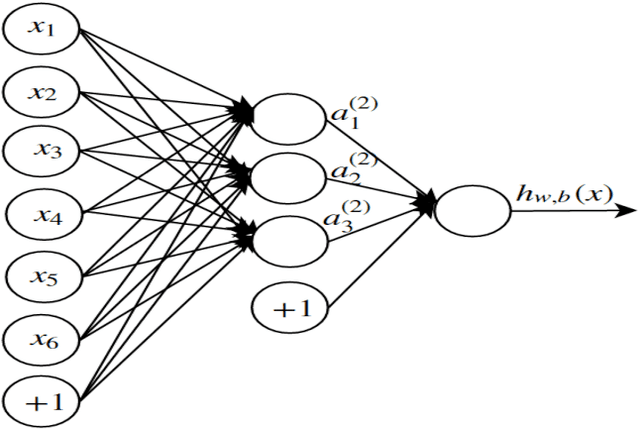
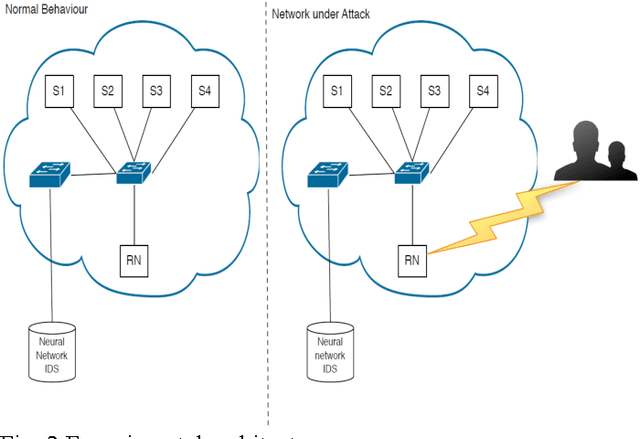
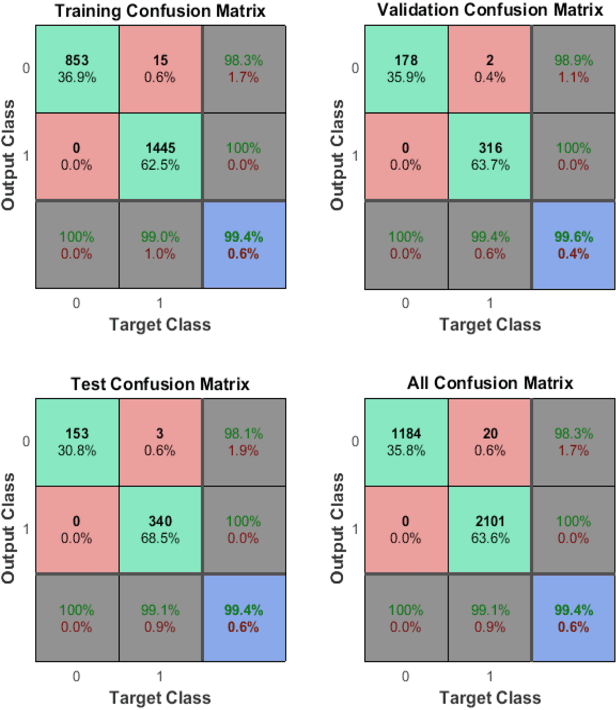
The Internet of things (IoT) is still in its infancy and has attracted much interest in many industrial sectors including medical fields, logistics tracking, smart cities and automobiles. However as a paradigm, it is susceptible to a range of significant intrusion threats. This paper presents a threat analysis of the IoT and uses an Artificial Neural Network (ANN) to combat these threats. A multi-level perceptron, a type of supervised ANN, is trained using internet packet traces, then is assessed on its ability to thwart Distributed Denial of Service (DDoS/DoS) attacks. This paper focuses on the classification of normal and threat patterns on an IoT Network. The ANN procedure is validated against a simulated IoT network. The experimental results demonstrate 99.4% accuracy and can successfully detect various DDoS/DoS attacks.
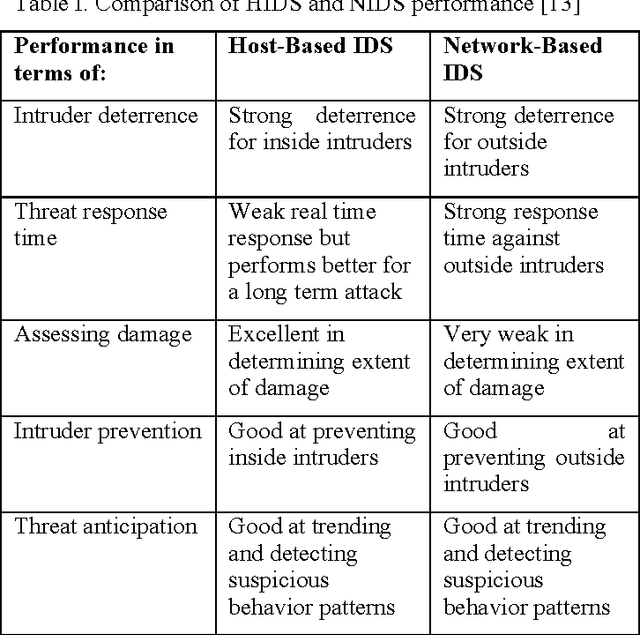
Shallow and Deep Networks Intrusion Detection System: A Taxonomy and Survey
Jan 09, 2017



Intrusion detection has attracted a considerable interest from researchers and industries. The community, after many years of research, still faces the problem of building reliable and efficient IDS that are capable of handling large quantities of data, with changing patterns in real time situations. The work presented in this manuscript classifies intrusion detection systems (IDS). Moreover, a taxonomy and survey of shallow and deep networks intrusion detection systems is presented based on previous and current works. This taxonomy and survey reviews machine learning techniques and their performance in detecting anomalies. Feature selection which influences the effectiveness of machine learning (ML) IDS is discussed to explain the role of feature selection in the classification and training phase of ML IDS. Finally, a discussion of the false and true positive alarm rates is presented to help researchers model reliable and efficient machine learning based intrusion detection systems.