 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreaking Down the Barriers: Investigating Non-Expert User Experiences in Robotic Teleoperation in UK and Japan
Oct 24, 2024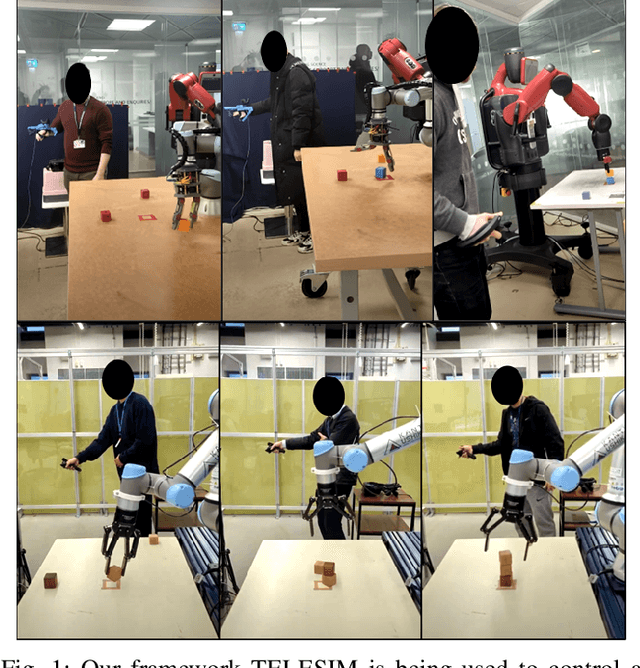
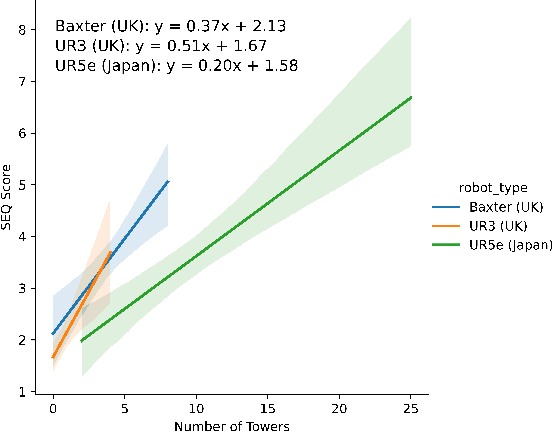
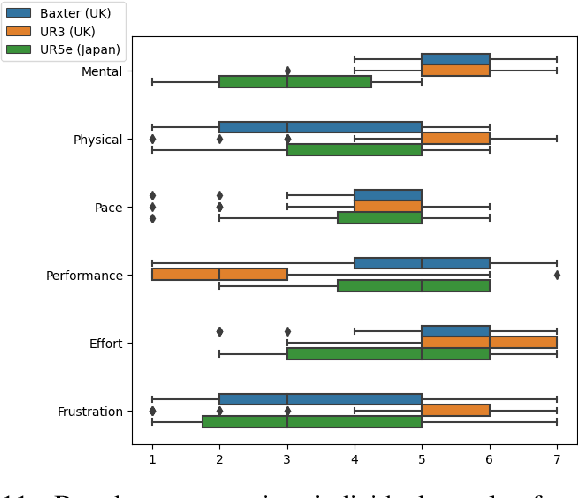
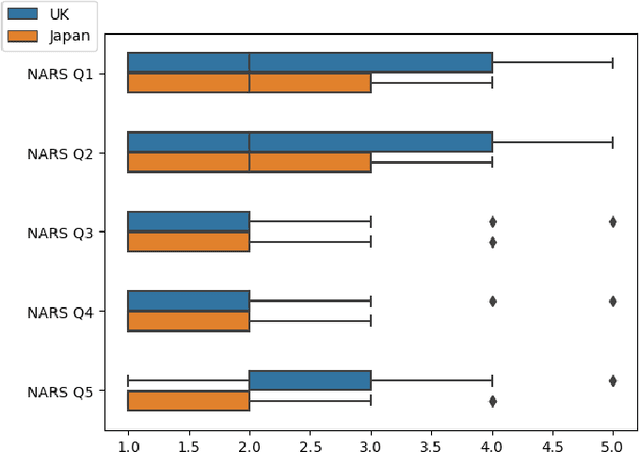
Robots are being created each year with the goal of integrating them into our daily lives. As such, there is an interest in research in evaluating the trust of humans toward robots. In addition, teleoperating robotic arms can be challenging for non-experts. In order to reduce the strain put on the user, we created TELESIM, a modular and plug-and-play framework that enables direct teleoperation of any robotic arm using a digital twin as the interface between users and the robotic system. However, analysis of the strain put on the user and its ability to trust robots was omitted. This paper addresses these omissions by presenting the additional results of our user survey of 37 participants carried out in UK. In addition, we present the results of an additional user survey, under similar conditions performed in Japan, with the goal of addressing the limitations of our previous approach, by interfacing a VR controller with a UR5e. Our experimental results show that the UR5e has a higher number of towers built. Additionally, the UR5e gives the least amount of cognitive stress, while the combination of Senseglove and UR3 gives the user the highest physical strain and causes the user to feel more frustrated. Finally, Japanese seems more trusting towards robots than British.
TELESIM: A Modular and Plug-and-Play Framework for Robotic Arm Teleoperation using a Digital Twin
Sep 20, 2023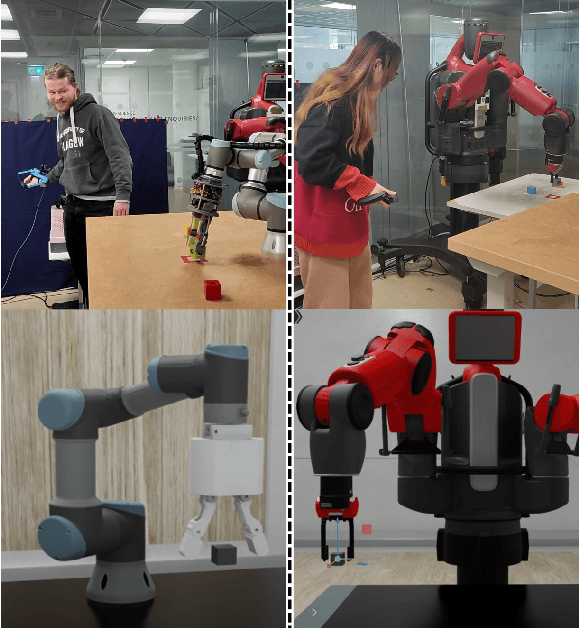
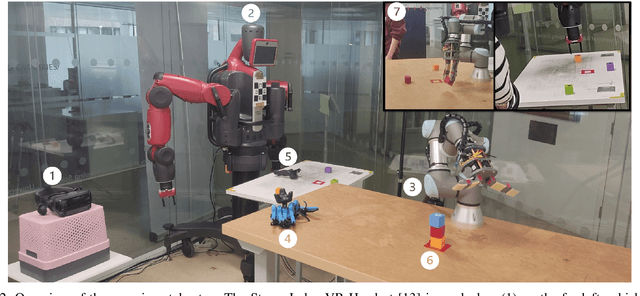
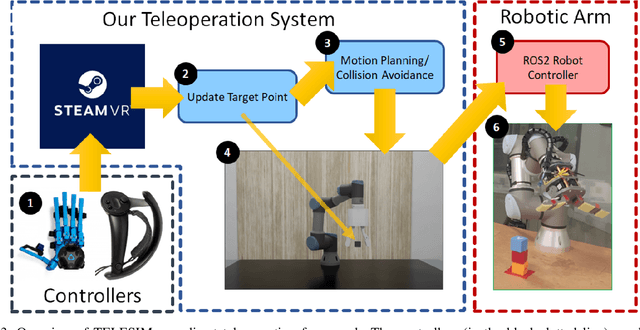
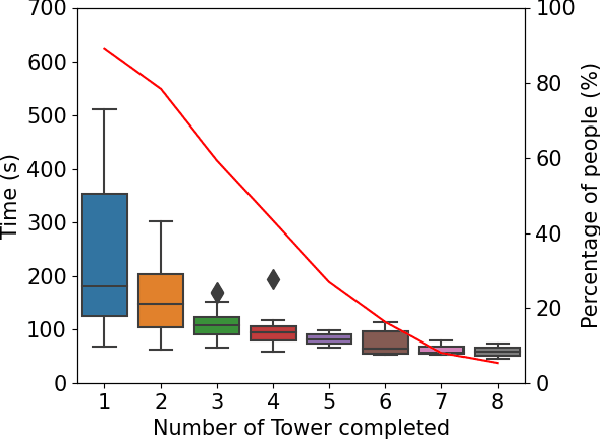
We present TELESIM, a modular and plug-and-play framework for direct teleoperation of a robotic arm using a digital twin as the interface between the user and the robotic system. We tested TELESIM by performing a user survey with 37 participants on two different robots using two different control modalities: a virtual reality controller and a finger mapping hardware controller using different grasping systems. Users were asked to teleoperate the robot to pick and place 3 cubes in a tower and to repeat this task as many times as possible in 10 minutes, with only 5 minutes of training beforehand. Our experimental results show that most users were able to succeed by building at least a tower of 3 cubes regardless of the control modality or robot used, demonstrating the user-friendliness of TELESIM.