 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIMMERTWIN: A Mixed Reality Framework for Enhanced Robotic Arm Teleoperation
Paper and Code
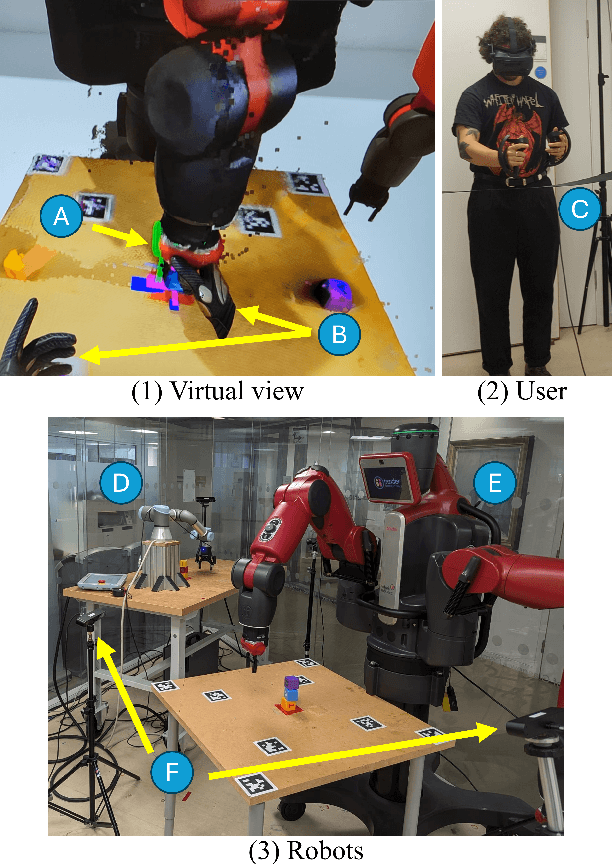
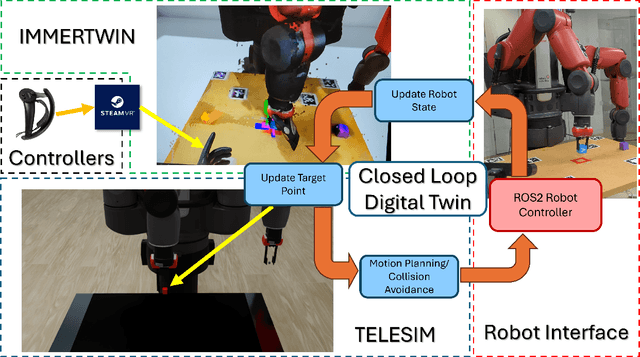
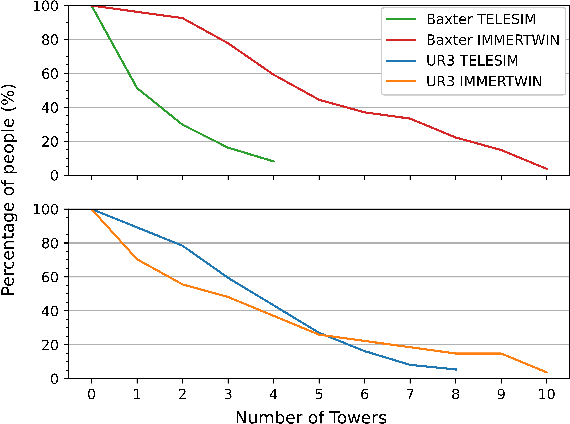
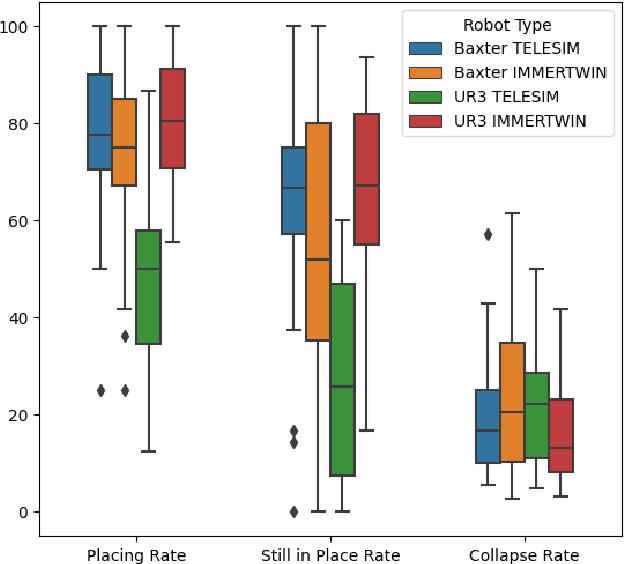
We present IMMERTWIN, a mixed reality framework for enhance robotic arm teleoperation using a closed-loop digital twin as a bridge for interaction between the user and the robotic system. We evaluated IMMERTWIN by performing a medium-scale user survey with 26 participants on two robots. Users were asked to teleoperate with both robots inside the virtual environment to pick and place 3 cubes in a tower and to repeat this task as many times as possible in 10 minutes, with only 5 minutes of training beforehand. Our experimental results show that most users were able to succeed by building at least a tower of 3 cubes regardless of the robot used and a maximum of 10 towers (1 tower per minute). In addition, users preferred to use IMMERTWIN over our previous work, TELESIM, as it caused them less mental workload. The project website and source code can be found at: https://cvas-ug.github.io/immertwin