 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Vision Transformers to 22 Billion Parameters
Feb 10, 2023



The scaling of Transformers has driven breakthrough capabilities for language models. At present, the largest large language models (LLMs) contain upwards of 100B parameters. Vision Transformers (ViT) have introduced the same architecture to image and video modelling, but these have not yet been successfully scaled to nearly the same degree; the largest dense ViT contains 4B parameters (Chen et al., 2022). We present a recipe for highly efficient and stable training of a 22B-parameter ViT (ViT-22B) and perform a wide variety of experiments on the resulting model. When evaluated on downstream tasks (often with a lightweight linear model on frozen features), ViT-22B demonstrates increasing performance with scale. We further observe other interesting benefits of scale, including an improved tradeoff between fairness and performance, state-of-the-art alignment to human visual perception in terms of shape/texture bias, and improved robustness. ViT-22B demonstrates the potential for "LLM-like" scaling in vision, and provides key steps towards getting there.
Object Scene Representation Transformer
Jun 14, 2022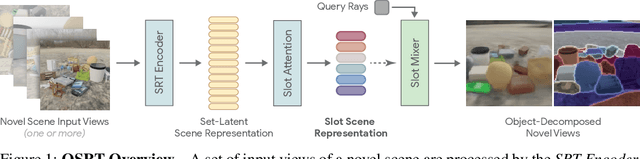

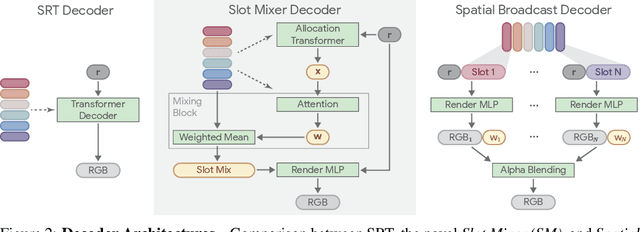
A compositional understanding of the world in terms of objects and their geometry in 3D space is considered a cornerstone of human cognition. Facilitating the learning of such a representation in neural networks holds promise for substantially improving labeled data efficiency. As a key step in this direction, we make progress on the problem of learning 3D-consistent decompositions of complex scenes into individual objects in an unsupervised fashion. We introduce Object Scene Representation Transformer (OSRT), a 3D-centric model in which individual object representations naturally emerge through novel view synthesis. OSRT scales to significantly more complex scenes with larger diversity of objects and backgrounds than existing methods. At the same time, it is multiple orders of magnitude faster at compositional rendering thanks to its light field parametrization and the novel Slot Mixer decoder. We believe this work will not only accelerate future architecture exploration and scaling efforts, but it will also serve as a useful tool for both object-centric as well as neural scene representation learning communities.