 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiLa-Net: Lightweight Latent LiDAR Autoencoder for 3D Point Cloud Reconstruction
Oct 02, 2025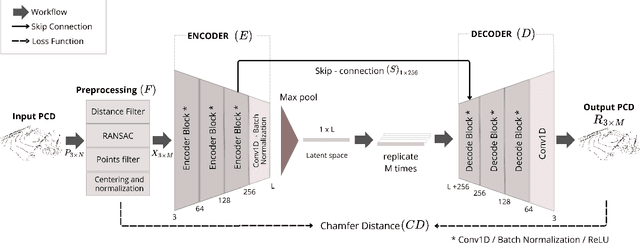
This work proposed a 3D autoencoder architecture, named LiLa-Net, which encodes efficient features from real traffic environments, employing only the LiDAR's point clouds. For this purpose, we have real semi-autonomous vehicle, equipped with Velodyne LiDAR. The system leverage skip connections concept to improve the performance without using extensive resources as the state-of-the-art architectures. Key changes include reducing the number of encoder layers and simplifying the skip connections, while still producing an efficient and representative latent space which allows to accurately reconstruct the original point cloud. Furthermore, an effective balance has been achieved between the information carried by the skip connections and the latent encoding, leading to improved reconstruction quality without compromising performance. Finally, the model demonstrates strong generalization capabilities, successfully reconstructing objects unrelated to the original traffic environment.
Joint object detection and re-identification for 3D obstacle multi-camera systems
Oct 09, 2023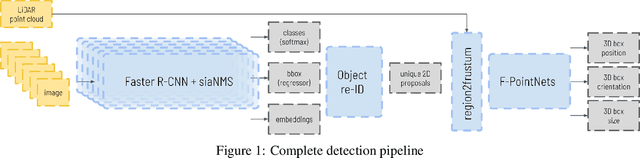
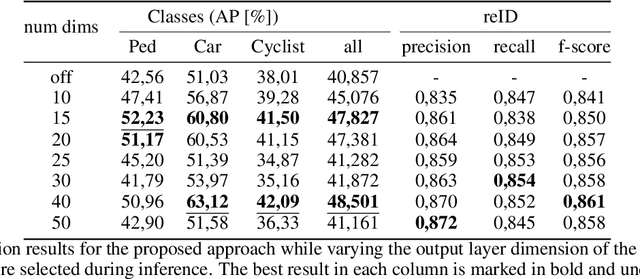
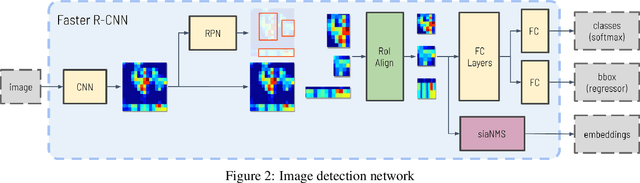
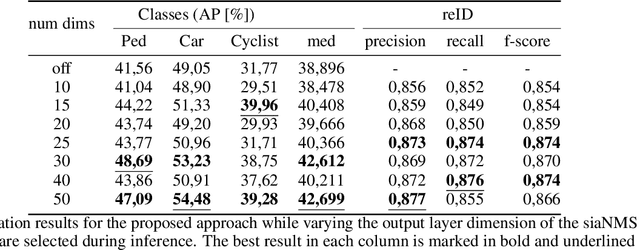
In recent years, the field of autonomous driving has witnessed remarkable advancements, driven by the integration of a multitude of sensors, including cameras and LiDAR systems, in different prototypes. However, with the proliferation of sensor data comes the pressing need for more sophisticated information processing techniques. This research paper introduces a novel modification to an object detection network that uses camera and lidar information, incorporating an additional branch designed for the task of re-identifying objects across adjacent cameras within the same vehicle while elevating the quality of the baseline 3D object detection outcomes. The proposed methodology employs a two-step detection pipeline: initially, an object detection network is employed, followed by a 3D box estimator that operates on the filtered point cloud generated from the network's detections. Extensive experimental evaluations encompassing both 2D and 3D domains validate the effectiveness of the proposed approach and the results underscore the superiority of this method over traditional Non-Maximum Suppression (NMS) techniques, with an improvement of more than 5\% in the car category in the overlapping areas.
Cycle and Semantic Consistent Adversarial Domain Adaptation for Reducing Simulation-to-Real Domain Shift in LiDAR Bird's Eye View
Apr 22, 2021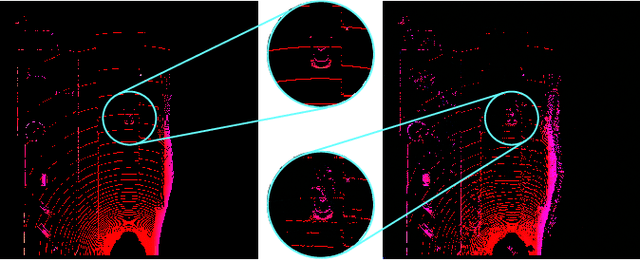
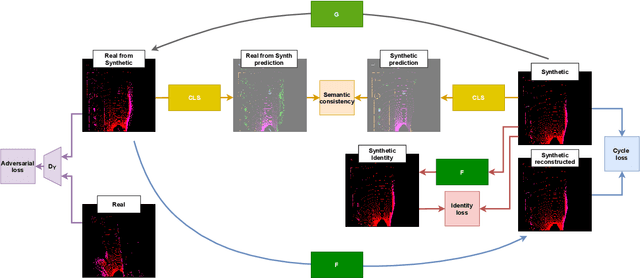
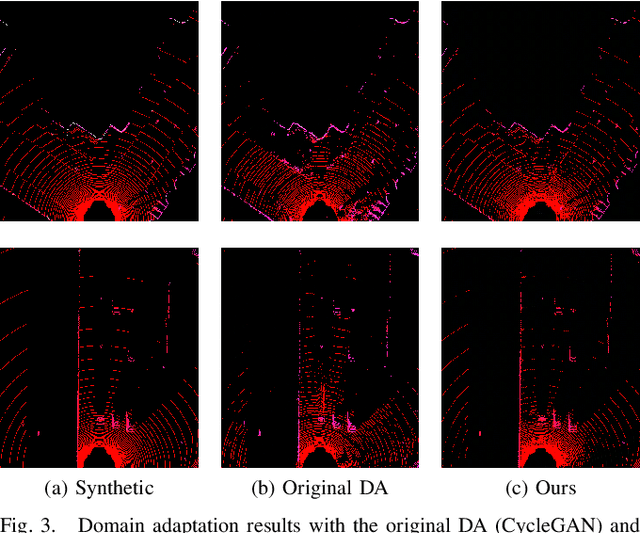

The performance of object detection methods based on LiDAR information is heavily impacted by the availability of training data, usually limited to certain laser devices. As a result, the use of synthetic data is becoming popular when training neural network models, as both sensor specifications and driving scenarios can be generated ad-hoc. However, bridging the gap between virtual and real environments is still an open challenge, as current simulators cannot completely mimic real LiDAR operation. To tackle this issue, domain adaptation strategies are usually applied, obtaining remarkable results on vehicle detection when applied to range view (RV) and bird's eye view (BEV) projections while failing for smaller road agents. In this paper, we present a BEV domain adaptation method based on CycleGAN that uses prior semantic classification in order to preserve the information of small objects of interest during the domain adaptation process. The quality of the generated BEVs has been evaluated using a state-of-the-art 3D object detection framework at KITTI 3D Object Detection Benchmark. The obtained results show the advantages of the proposed method over the existing alternatives.
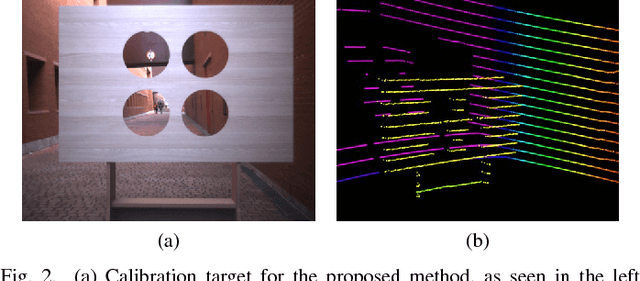
Automatic Extrinsic Calibration Method for LiDAR and Camera Sensor Setups
Jan 12, 2021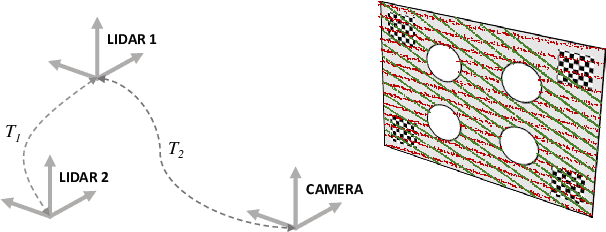
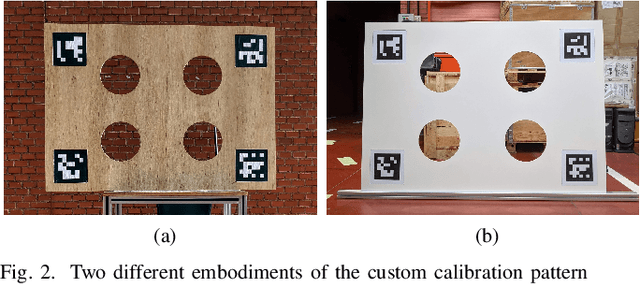

Most sensor setups for onboard autonomous perception are composed of LiDARs and vision systems, as they provide complementary information that improves the reliability of the different algorithms necessary to obtain a robust scene understanding. However, the effective use of information from different sources requires an accurate calibration between the sensors involved, which usually implies a tedious and burdensome process. We present a method to calibrate the extrinsic parameters of any pair of sensors involving LiDARs, monocular or stereo cameras, of the same or different modalities. The procedure is composed of two stages: first, reference points belonging to a custom calibration target are extracted from the data provided by the sensors to be calibrated, and second, the optimal rigid transformation is found through the registration of both point sets. The proposed approach can handle devices with very different resolutions and poses, as usually found in vehicle setups. In order to assess the performance of the proposed method, a novel evaluation suite built on top of a popular simulation framework is introduced. Experiments on the synthetic environment show that our calibration algorithm significantly outperforms existing methods, whereas real data tests corroborate the results obtained in the evaluation suite. Open-source code is available at https://github.com/beltransen/velo2cam_calibration
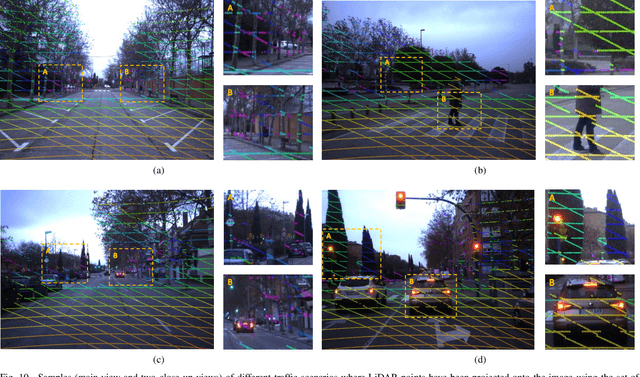
Towards Autonomous Driving: a Multi-Modal 360$^{\circ}$ Perception Proposal
Aug 21, 2020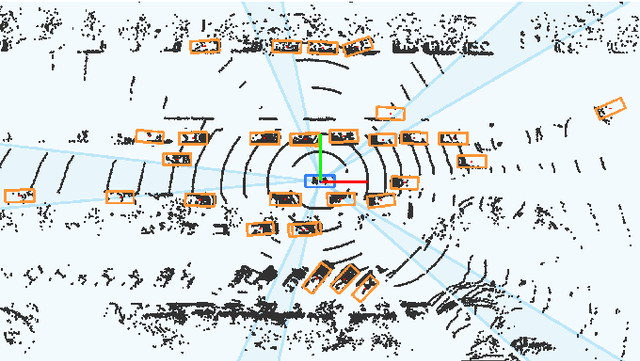
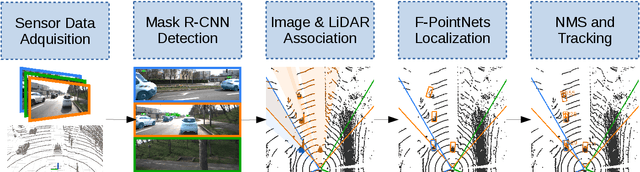
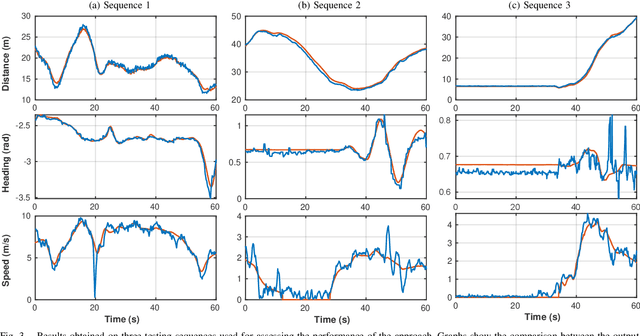
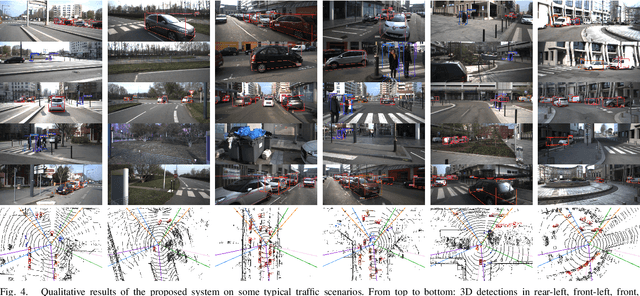
In this paper, a multi-modal 360$^{\circ}$ framework for 3D object detection and tracking for autonomous vehicles is presented. The process is divided into four main stages. First, images are fed into a CNN network to obtain instance segmentation of the surrounding road participants. Second, LiDAR-to-image association is performed for the estimated mask proposals. Then, the isolated points of every object are processed by a PointNet ensemble to compute their corresponding 3D bounding boxes and poses. Lastly, a tracking stage based on Unscented Kalman Filter is used to track the agents along time. The solution, based on a novel sensor fusion configuration, provides accurate and reliable road environment detection. A wide variety of tests of the system, deployed in an autonomous vehicle, have successfully assessed the suitability of the proposed perception stack in a real autonomous driving application.
BirdNet+: End-to-End 3D Object Detection in LiDAR Bird's Eye View
Mar 09, 2020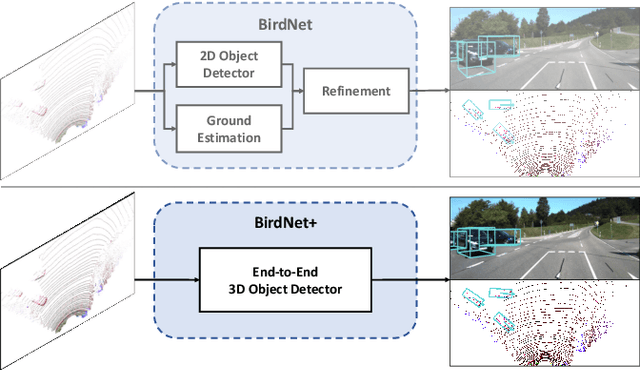
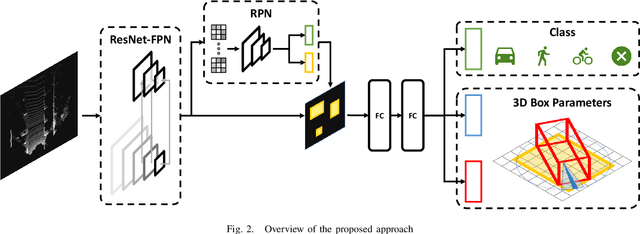
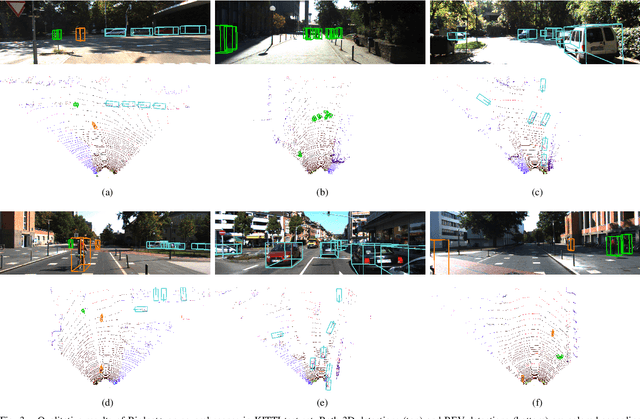
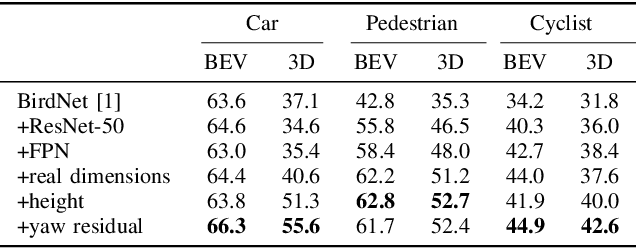
On-board 3D object detection in autonomous vehicles often relies on geometry information captured by LiDAR devices. Albeit image features are typically preferred for detection, numerous approaches take only spatial data as input. Exploiting this information in inference usually involves the use of compact representations such as the Bird's Eye View (BEV) projection, which entails a loss of information and thus hinders the joint inference of all the parameters of the objects' 3D boxes. In this paper, we present a fully end-to-end 3D object detection framework that can infer oriented 3D boxes solely from BEV images by using a two-stage object detector and ad-hoc regression branches, eliminating the need for a post-processing stage. The method outperforms its predecessor (BirdNet) by a large margin and obtains state-of-the-art results on the KITTI 3D Object Detection Benchmark for all the categories in evaluation.
Lane Detection and Classification using Cascaded CNNs
Jul 17, 2019


Lane detection is extremely important for autonomous vehicles. For this reason, many approaches use lane boundary information to locate the vehicle inside the street, or to integrate GPS-based localization. As many other computer vision based tasks, convolutional neural networks (CNNs) represent the state-of-the-art technology to indentify lane boundaries. However, the position of the lane boundaries w.r.t. the vehicle may not suffice for a reliable positioning, as for path planning or localization information regarding lane types may also be needed. In this work, we present an end-to-end system for lane boundary identification, clustering and classification, based on two cascaded neural networks, that runs in real-time. To build the system, 14336 lane boundaries instances of the TuSimple dataset for lane detection have been labelled using 8 different classes. Our dataset and the code for inference are available online.
Enhanced free space detection in multiple lanes based on single CNN with scene identification
May 06, 2019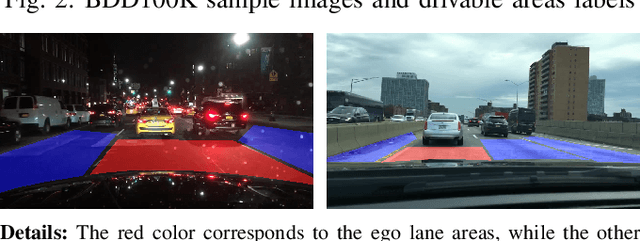
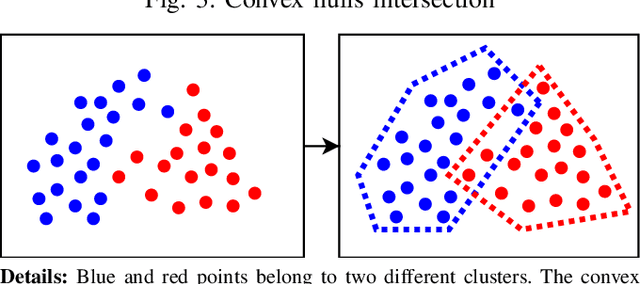
Many systems for autonomous vehicles' navigation rely on lane detection. Traditional algorithms usually estimate only the position of the lanes on the road, but an autonomous control system may also need to know if a lane marking can be crossed or not, and what portion of space inside the lane is free from obstacles, to make safer control decisions. On the other hand, free space detection algorithms only detect navigable areas, without information about lanes. State-of-the-art algorithms use CNNs for both tasks, with significant consumption of computing resources. We propose a novel approach that estimates the free space inside each lane, with a single CNN. Additionally, adding only a small requirement concerning GPU RAM, we infer the road type, that will be useful for path planning. To achieve this result, we train a multi-task CNN. Then, we further elaborate the output of the network, to extract polygons that can be effectively used in navigation control. Finally, we provide a computationally efficient implementation, based on ROS, that can be executed in real time. Our code and trained models are available online.
Automatic Extrinsic Calibration for Lidar-Stereo Vehicle Sensor Setups
Jul 27, 2017


Sensor setups consisting of a combination of 3D range scanner lasers and stereo vision systems are becoming a popular choice for on-board perception systems in vehicles; however, the combined use of both sources of information implies a tedious calibration process. We present a method for extrinsic calibration of lidar-stereo camera pairs without user intervention. Our calibration approach is aimed to cope with the constraints commonly found in automotive setups, such as low-resolution and specific sensor poses. To demonstrate the performance of our method, we also introduce a novel approach for the quantitative assessment of the calibration results, based on a simulation environment. Tests using real devices have been conducted as well, proving the usability of the system and the improvement over the existing approaches. Code is available at http://wiki.ros.org/velo2cam_calibration