 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Gym: Benchmarking Reinforcement Learning in Human-Robot Collaboration
Oct 09, 2023



Deep reinforcement learning (RL) has shown promising results in robot motion planning with first attempts in human-robot collaboration (HRC). However, a fair comparison of RL approaches in HRC under the constraint of guaranteed safety is yet to be made. We, therefore, present human-robot gym, a benchmark for safe RL in HRC. Our benchmark provides eight challenging, realistic HRC tasks in a modular simulation framework. Most importantly, human-robot gym includes a safety shield that provably guarantees human safety. We are, thereby, the first to provide a benchmark to train RL agents that adhere to the safety specifications of real-world HRC. This bridges a critical gap between theoretic RL research and its real-world deployment. Our evaluation of six environments led to three key results: (a) the diverse nature of the tasks offered by human-robot gym creates a challenging benchmark for state-of-the-art RL methods, (b) incorporating expert knowledge in the RL training in the form of an action-based reward can outperform the expert, and (c) our agents negligibly overfit to training data.
Control of Two-way Coupled Fluid Systems with Differentiable Solvers
Jun 01, 2022
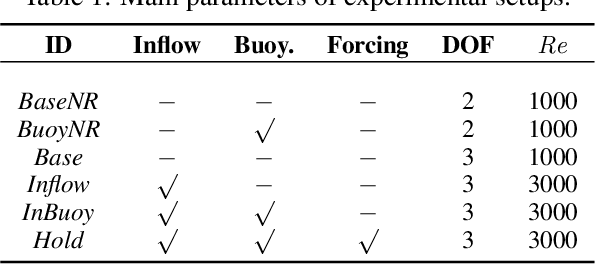


We investigate the use of deep neural networks to control complex nonlinear dynamical systems, specifically the movement of a rigid body immersed in a fluid. We solve the Navier Stokes equations with two way coupling, which gives rise to nonlinear perturbations that make the control task very challenging. Neural networks are trained in an unsupervised way to act as controllers with desired characteristics through a process of learning from a differentiable simulator. Here we introduce a set of physically interpretable loss terms to let the networks learn robust and stable interactions. We demonstrate that controllers trained in a canonical setting with quiescent initial conditions reliably generalize to varied and challenging environments such as previously unseen inflow conditions and forcing, although they do not have any fluid information as input. Further, we show that controllers trained with our approach outperform a variety of classical and learned alternatives in terms of evaluation metrics and generalization capabilities.
Physics-based Deep Learning
Sep 11, 2021This digital book contains a practical and comprehensive introduction of everything related to deep learning in the context of physical simulations. As much as possible, all topics come with hands-on code examples in the form of Jupyter notebooks to quickly get started. Beyond standard supervised learning from data, we'll look at physical loss constraints, more tightly coupled learning algorithms with differentiable simulations, as well as reinforcement learning and uncertainty modeling. We live in exciting times: these methods have a huge potential to fundamentally change what computer simulations can achieve.