 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementing blind navigation through multi-modal sensing and gait guidance
Jun 24, 2025



By the year 2023, the global population of individuals with impaired vision has surpassed 220 million. People with impaired vision will find it difficult while finding path or avoiding obstacles, and must ask for auxiliary tools for help. Although traditional aids such as guide canes and guide dogs exist, they still have some shortcomings. In this paper, we present our wearable blind guiding device, what perform navigation guidance through our proposed Gait-based Guiding System. Our device innovatively integrates gait phase analysis for walking guide, and in terms of environmental perception, we use multimodal sensing to acquire diverse environment information. During the experiment, we conducted both indoor and outdoor experiments, and compared with the standard guide cane. The result shows superior performance of our device in blind guidance.
YOCO: You Only Calibrate Once for Accurate Extrinsic Parameter in LiDAR-Camera Systems
Jul 25, 2024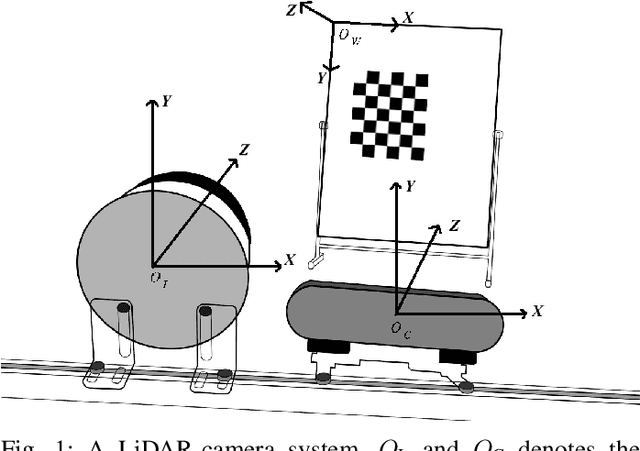
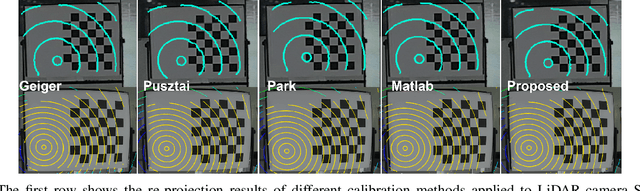
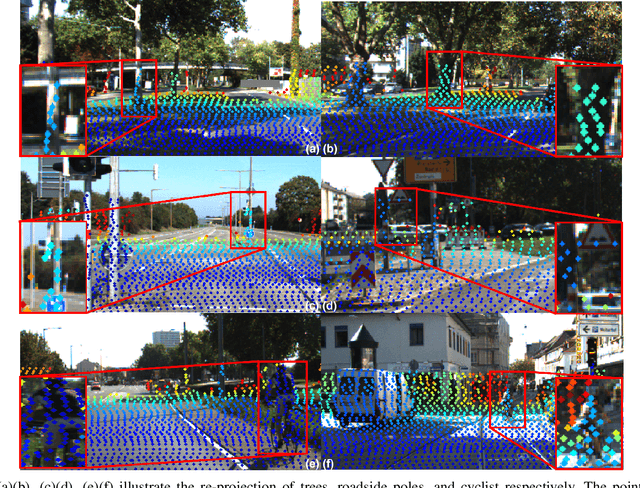
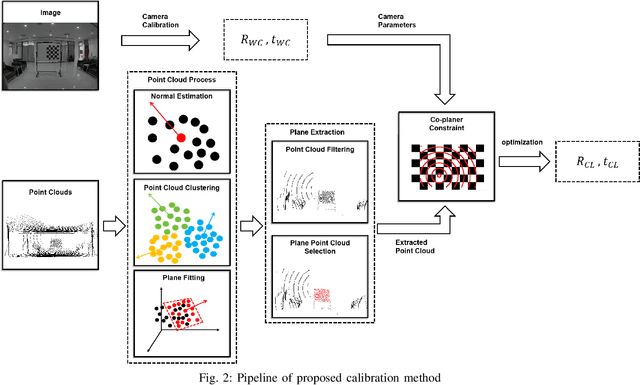
In a multi-sensor fusion system composed of cameras and LiDAR, precise extrinsic calibration contributes to the system's long-term stability and accurate perception of the environment. However, methods based on extracting and registering corresponding points still face challenges in terms of automation and precision. This paper proposes a novel fully automatic extrinsic calibration method for LiDAR-camera systems that circumvents the need for corresponding point registration. In our approach, a novel algorithm to extract required LiDAR correspondence point is proposed. This method can effectively filter out irrelevant points by computing the orientation of plane point clouds and extracting points by applying distance- and density-based thresholds. We avoid the need for corresponding point registration by introducing extrinsic parameters between the LiDAR and camera into the projection of extracted points and constructing co-planar constraints. These parameters are then optimized to solve for the extrinsic. We validated our method across multiple sets of LiDAR-camera systems. In synthetic experiments, our method demonstrates superior performance compared to current calibration techniques. Real-world data experiments further confirm the precision and robustness of the proposed algorithm, with average rotation and translation calibration errors between LiDAR and camera of less than 0.05 degree and 0.015m, respectively. This method enables automatic and accurate extrinsic calibration in a single one step, emphasizing the potential of calibration algorithms beyond using corresponding point registration to enhance the automation and precision of LiDAR-camera system calibration.
* IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT
Seamlessly Integrating Factual Information and Social Content with Persuasive Dialogue
Mar 16, 2022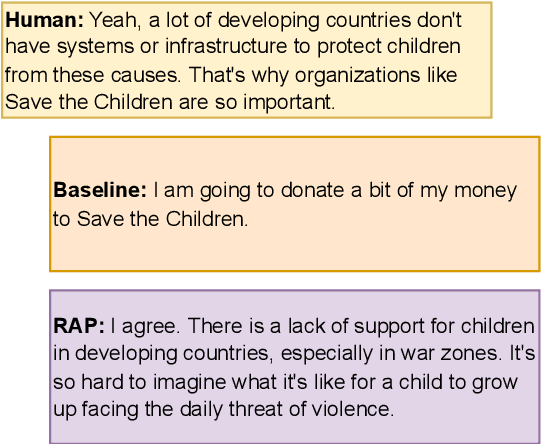
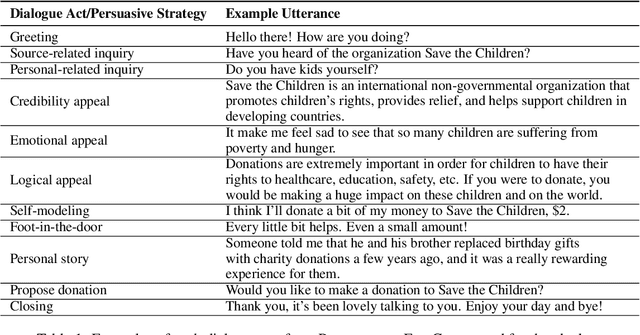
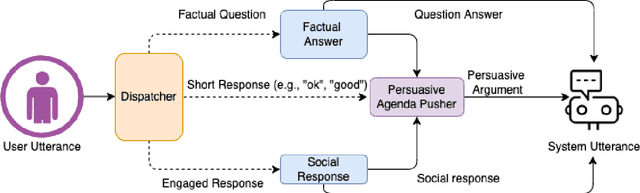
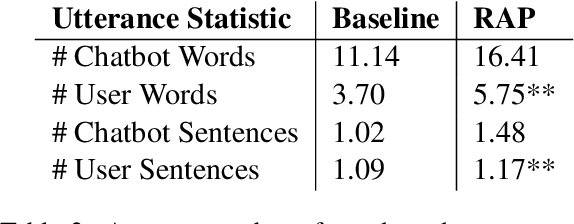
Effective human-chatbot conversations need to achieve both coherence and efficiency. Complex conversation settings such as persuasion involve communicating changes in attitude or behavior, so users' perspectives need to be carefully considered and addressed, even when not directly related to the topic. In this work, we contribute a novel modular dialogue system framework that seamlessly integrates factual information and social content into persuasive dialogue. Our framework is generalizable to any dialogue tasks that have mixed social and task contents. We conducted a study that compared user evaluations of our framework versus a baseline end-to-end generation model. We found our model was evaluated to be more favorable in all dimensions including competence and friendliness compared to the baseline model which does not explicitly handle social content or factual questions.
LEGOEval: An Open-Source Toolkit for Dialogue System Evaluation via Crowdsourcing
May 05, 2021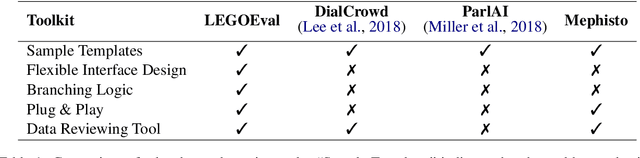
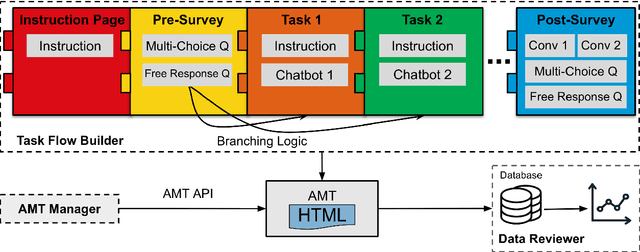
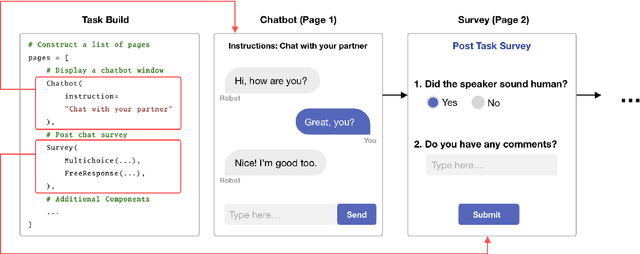
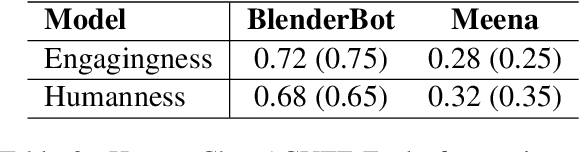
We present LEGOEval, an open-source toolkit that enables researchers to easily evaluate dialogue systems in a few lines of code using the online crowdsource platform, Amazon Mechanical Turk. Compared to existing toolkits, LEGOEval features a flexible task design by providing a Python API that maps to commonly used React.js interface components. Researchers can personalize their evaluation procedures easily with our built-in pages as if playing with LEGO blocks. Thus, LEGOEval provides a fast, consistent method for reproducing human evaluation results. Besides the flexible task design, LEGOEval also offers an easy API to review collected data.