 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular Depth Distribution Alignment with Low Computation
Mar 09, 2022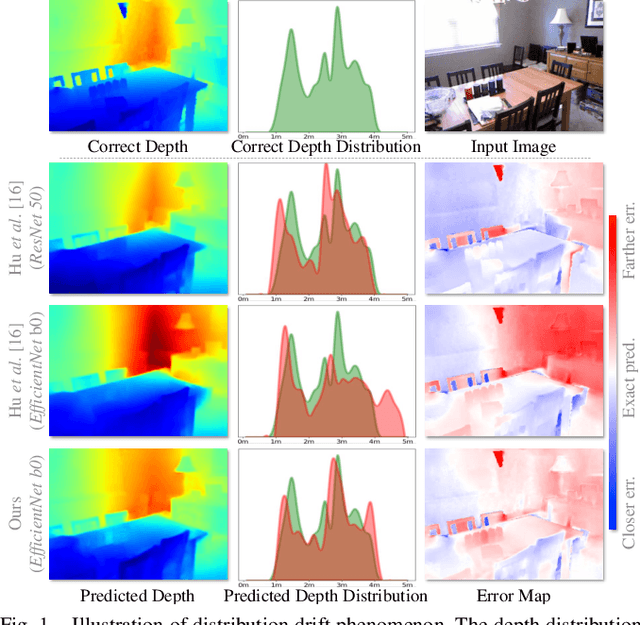
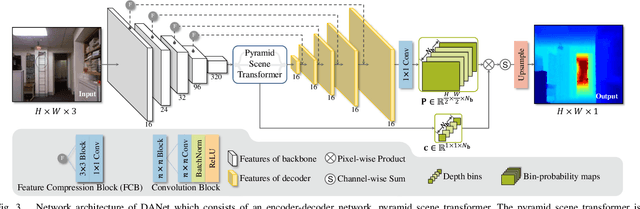
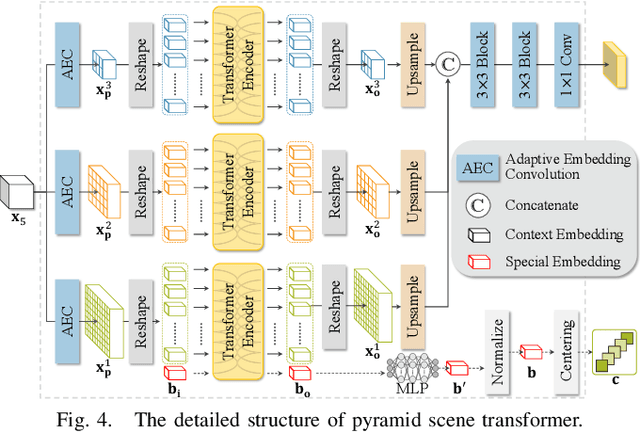
The performance of monocular depth estimation generally depends on the amount of parameters and computational cost. It leads to a large accuracy contrast between light-weight networks and heavy-weight networks, which limits their application in the real world. In this paper, we model the majority of accuracy contrast between them as the difference of depth distribution, which we call "Distribution drift". To this end, a distribution alignment network (DANet) is proposed. We firstly design a pyramid scene transformer (PST) module to capture inter-region interaction in multiple scales. By perceiving the difference of depth features between every two regions, DANet tends to predict a reasonable scene structure, which fits the shape of distribution to ground truth. Then, we propose a local-global optimization (LGO) scheme to realize the supervision of global range of scene depth. Thanks to the alignment of depth distribution shape and scene depth range, DANet sharply alleviates the distribution drift, and achieves a comparable performance with prior heavy-weight methods, but uses only 1% floating-point operations per second (FLOPs) of them. The experiments on two datasets, namely the widely used NYUDv2 dataset and the more challenging iBims-1 dataset, demonstrate the effectiveness of our method. The source code is available at https://github.com/YiLiM1/DANet.
Fast Road Segmentation via Uncertainty-aware Symmetric Network
Mar 09, 2022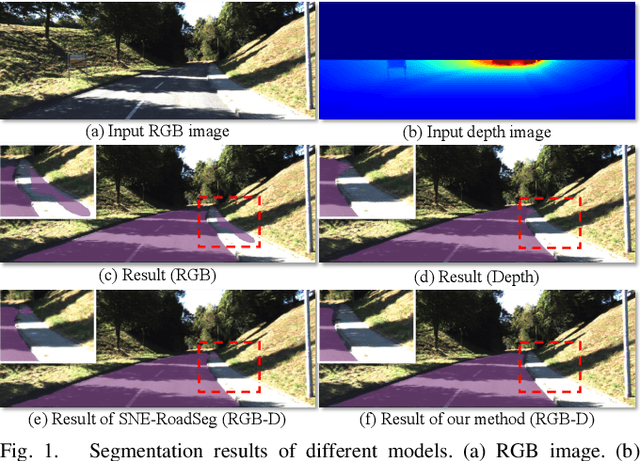
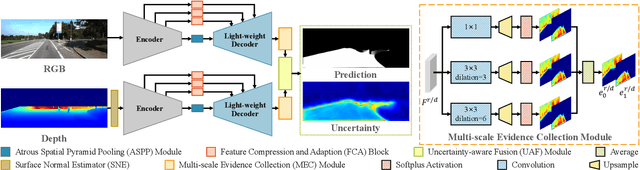

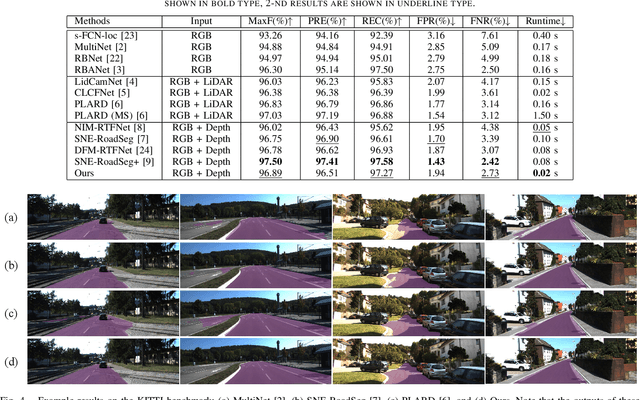
The high performance of RGB-D based road segmentation methods contrasts with their rare application in commercial autonomous driving, which is owing to two reasons: 1) the prior methods cannot achieve high inference speed and high accuracy in both ways; 2) the different properties of RGB and depth data are not well-exploited, limiting the reliability of predicted road. In this paper, based on the evidence theory, an uncertainty-aware symmetric network (USNet) is proposed to achieve a trade-off between speed and accuracy by fully fusing RGB and depth data. Firstly, cross-modal feature fusion operations, which are indispensable in the prior RGB-D based methods, are abandoned. We instead separately adopt two light-weight subnetworks to learn road representations from RGB and depth inputs. The light-weight structure guarantees the real-time inference of our method. Moreover, a multiscale evidence collection (MEC) module is designed to collect evidence in multiple scales for each modality, which provides sufficient evidence for pixel class determination. Finally, in uncertainty-aware fusion (UAF) module, the uncertainty of each modality is perceived to guide the fusion of the two subnetworks. Experimental results demonstrate that our method achieves a state-of-the-art accuracy with real-time inference speed of 43+ FPS. The source code is available at https://github.com/morancyc/USNet.
Boundary-induced and scene-aggregated network for monocular depth prediction
Feb 26, 2021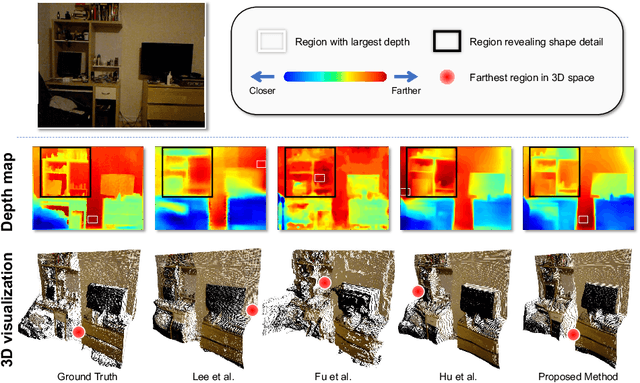
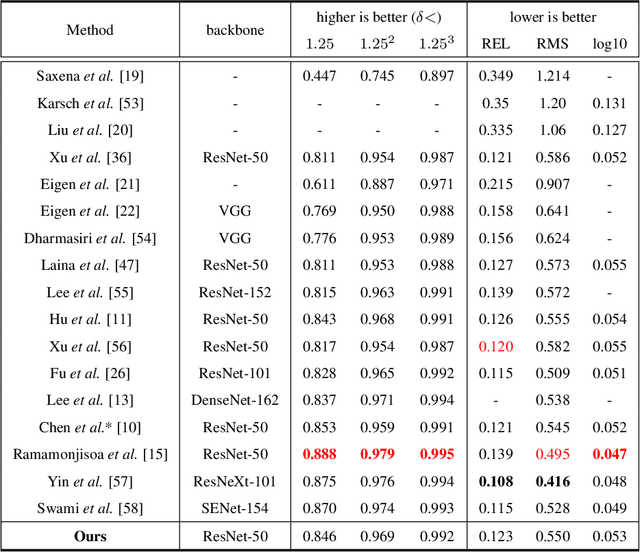
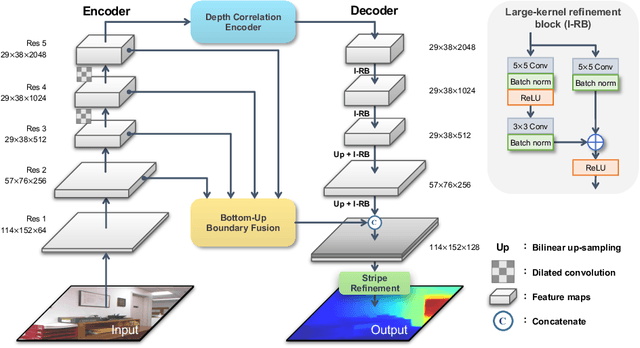
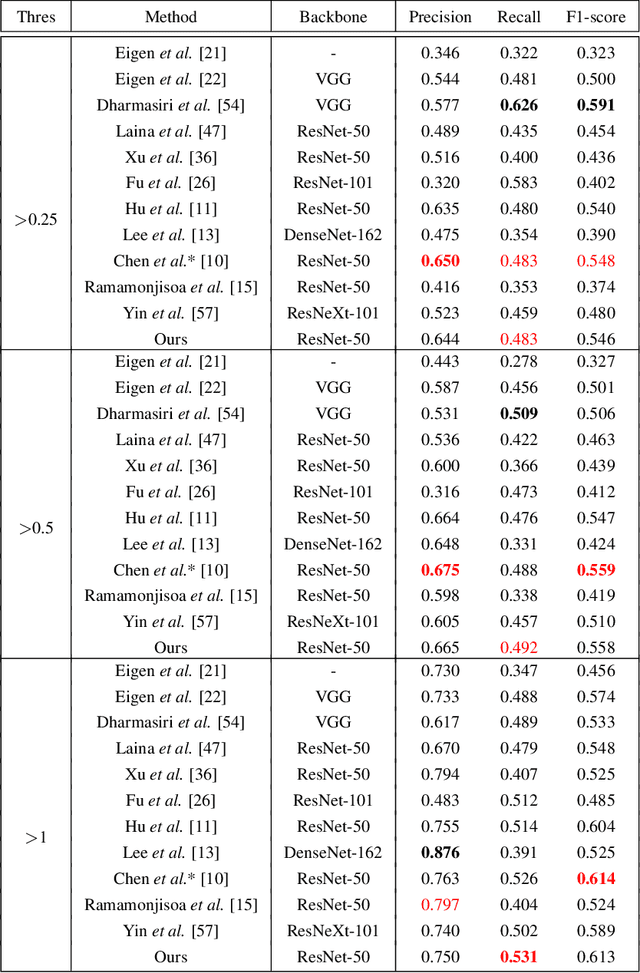
Monocular depth prediction is an important task in scene understanding. It aims to predict the dense depth of a single RGB image. With the development of deep learning, the performance of this task has made great improvements. However, two issues remain unresolved: (1) The deep feature encodes the wrong farthest region in a scene, which leads to a distorted 3D structure of the predicted depth; (2) The low-level features are insufficient utilized, which makes it even harder to estimate the depth near the edge with sudden depth change. To tackle these two issues, we propose the Boundary-induced and Scene-aggregated network (BS-Net). In this network, the Depth Correlation Encoder (DCE) is first designed to obtain the contextual correlations between the regions in an image, and perceive the farthest region by considering the correlations. Meanwhile, the Bottom-Up Boundary Fusion (BUBF) module is designed to extract accurate boundary that indicates depth change. Finally, the Stripe Refinement module (SRM) is designed to refine the dense depth induced by the boundary cue, which improves the boundary accuracy of the predicted depth. Several experimental results on the NYUD v2 dataset and \xff{the iBims-1 dataset} illustrate the state-of-the-art performance of the proposed approach. And the SUN-RGBD dataset is employed to evaluate the generalization of our method. Code is available at https://github.com/XuefengBUPT/BS-Net.