 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Road Segmentation via Uncertainty-aware Symmetric Network
Paper and Code
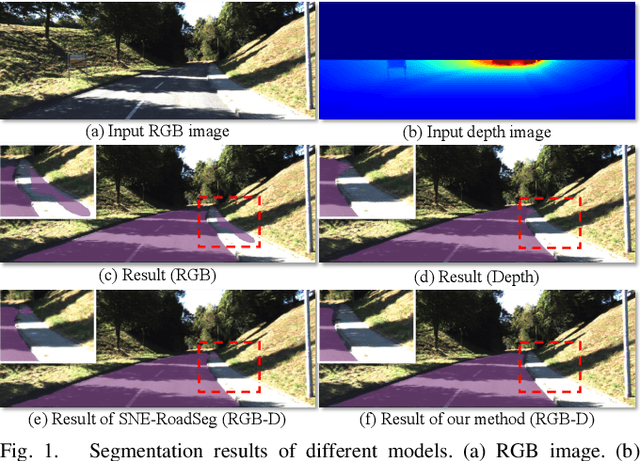
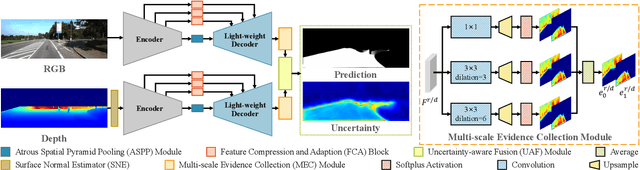

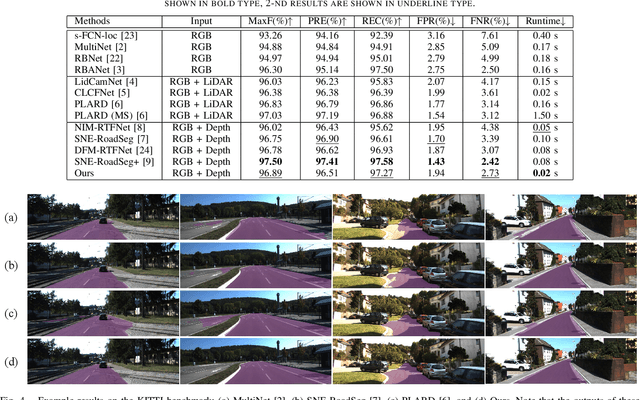
The high performance of RGB-D based road segmentation methods contrasts with their rare application in commercial autonomous driving, which is owing to two reasons: 1) the prior methods cannot achieve high inference speed and high accuracy in both ways; 2) the different properties of RGB and depth data are not well-exploited, limiting the reliability of predicted road. In this paper, based on the evidence theory, an uncertainty-aware symmetric network (USNet) is proposed to achieve a trade-off between speed and accuracy by fully fusing RGB and depth data. Firstly, cross-modal feature fusion operations, which are indispensable in the prior RGB-D based methods, are abandoned. We instead separately adopt two light-weight subnetworks to learn road representations from RGB and depth inputs. The light-weight structure guarantees the real-time inference of our method. Moreover, a multiscale evidence collection (MEC) module is designed to collect evidence in multiple scales for each modality, which provides sufficient evidence for pixel class determination. Finally, in uncertainty-aware fusion (UAF) module, the uncertainty of each modality is perceived to guide the fusion of the two subnetworks. Experimental results demonstrate that our method achieves a state-of-the-art accuracy with real-time inference speed of 43+ FPS. The source code is available at https://github.com/morancyc/USNet.