 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLR: Learning Quadruped Locomotion without Privileged Information
Jun 07, 2024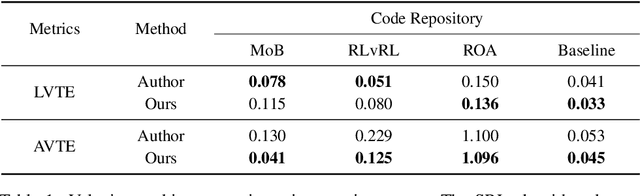
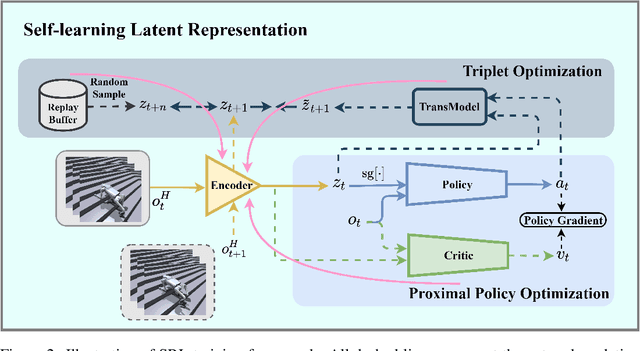
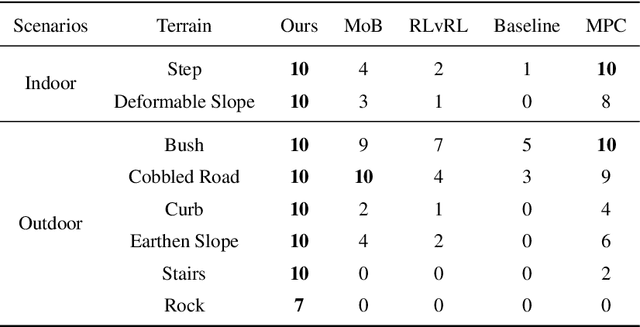
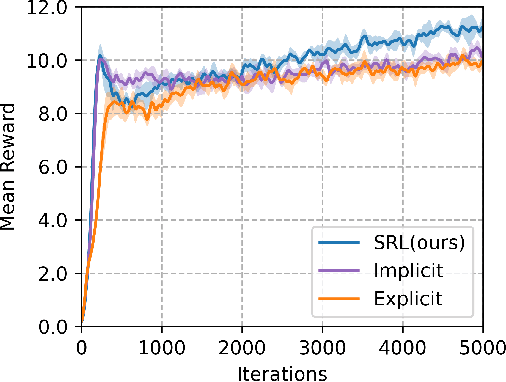
Traditional reinforcement learning control for quadruped robots often relies on privileged information, demanding meticulous selection and precise estimation, thereby imposing constraints on the development process. This work proposes a Self-learning Latent Representation (SLR) method, which achieves high-performance control policy learning without the need for privileged information. To enhance the credibility of our proposed method's evaluation, SLR is compared with open-source code repositories of state-of-the-art algorithms, retaining the original authors' configuration parameters. Across four repositories, SLR consistently outperforms the reference results. Ultimately, the trained policy and encoder empower the quadruped robot to navigate steps, climb stairs, ascend rocks, and traverse various challenging terrains. Robot experiment videos are at https://11chens.github.io/SLR/
LP-SLAM: Language-Perceptive RGB-D SLAM system based on Large Language Model
Mar 17, 2023Simultaneous localization and mapping (SLAM) is a critical technology that enables autonomous robots to be aware of their surrounding environment. With the development of deep learning, SLAM systems can achieve a higher level of perception of the environment, including the semantic and text levels. However, current works are limited in their ability to achieve a natural-language level of perception of the world. To address this limitation, we propose LP-SLAM, the first language-perceptive SLAM system that leverages large language models (LLMs). LP-SLAM has two major features: (a) it can detect text in the scene and determine whether it represents a landmark to be stored during the tracking and mapping phase, and (b) it can understand natural language input from humans and provide guidance based on the generated map. We illustrated three usages of the LLM in the system including text cluster, landmark judgment, and natural language navigation. Our proposed system represents an advancement in the field of LLMs based SLAM and opens up new possibilities for autonomous robots to interact with their environment in a more natural and intuitive way.