 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLR: Learning Quadruped Locomotion without Privileged Information
Paper and Code
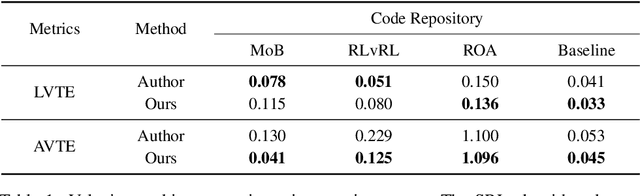
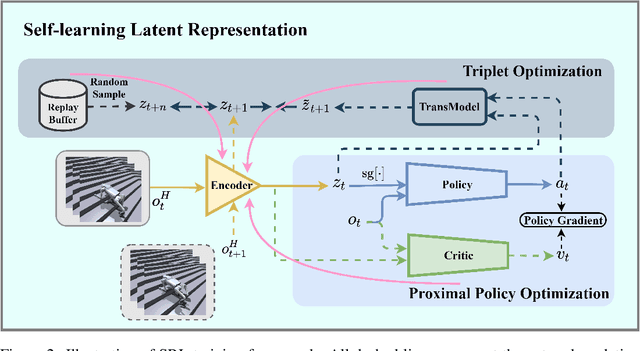
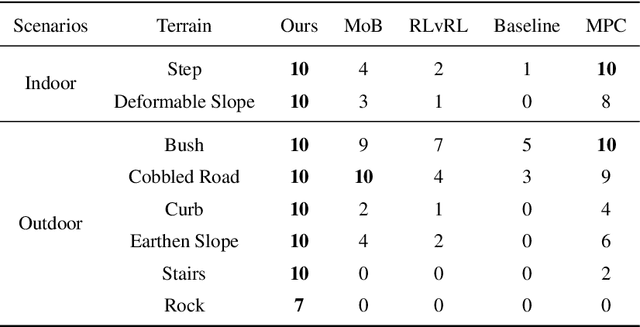
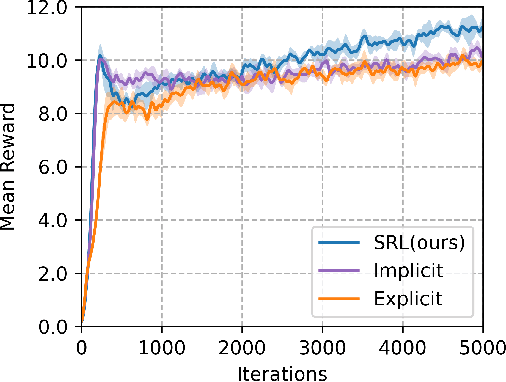
Traditional reinforcement learning control for quadruped robots often relies on privileged information, demanding meticulous selection and precise estimation, thereby imposing constraints on the development process. This work proposes a Self-learning Latent Representation (SLR) method, which achieves high-performance control policy learning without the need for privileged information. To enhance the credibility of our proposed method's evaluation, SLR is compared with open-source code repositories of state-of-the-art algorithms, retaining the original authors' configuration parameters. Across four repositories, SLR consistently outperforms the reference results. Ultimately, the trained policy and encoder empower the quadruped robot to navigate steps, climb stairs, ascend rocks, and traverse various challenging terrains. Robot experiment videos are at https://11chens.github.io/SLR/