 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Invariant Compiler for Neural ODEs in AI-Accelerated Scientific Simulation
Mar 25, 2026Neural ODEs are increasingly used as continuous-time models for scientific and sensor data, but unconstrained neural ODEs can drift and violate domain invariants (e.g., conservation laws), yielding physically implausible solutions. In turn, this can compound error in long-horizon prediction and surrogate simulation. Existing solutions typically aim to enforce invariance by soft penalties or other forms of regularization, which can reduce overall error but do not guarantee that trajectories will not leave the constraint manifold. We introduce the invariant compiler, a framework that enforces invariants by construction: it treats invariants as first-class types and uses an LLM-driven compilation workflow to translate a generic neural ODE specification into a structure-preserving architecture whose trajectories remain on the admissible manifold in continuous time (and up to numerical integration error in practice). This compiler view cleanly separates what must be preserved (scientific structure) from what is learned from data (dynamics within that structure). It provides a systematic design pattern for invariant-respecting neural surrogates across scientific domains.
ZEST: Zero-shot Embodied Skill Transfer for Athletic Robot Control
Jan 30, 2026Achieving robust, human-like whole-body control on humanoid robots for agile, contact-rich behaviors remains a central challenge, demanding heavy per-skill engineering and a brittle process of tuning controllers. We introduce ZEST (Zero-shot Embodied Skill Transfer), a streamlined motion-imitation framework that trains policies via reinforcement learning from diverse sources -- high-fidelity motion capture, noisy monocular video, and non-physics-constrained animation -- and deploys them to hardware zero-shot. ZEST generalizes across behaviors and platforms while avoiding contact labels, reference or observation windows, state estimators, and extensive reward shaping. Its training pipeline combines adaptive sampling, which focuses training on difficult motion segments, and an automatic curriculum using a model-based assistive wrench, together enabling dynamic, long-horizon maneuvers. We further provide a procedure for selecting joint-level gains from approximate analytical armature values for closed-chain actuators, along with a refined model of actuators. Trained entirely in simulation with moderate domain randomization, ZEST demonstrates remarkable generality. On Boston Dynamics' Atlas humanoid, ZEST learns dynamic, multi-contact skills (e.g., army crawl, breakdancing) from motion capture. It transfers expressive dance and scene-interaction skills, such as box-climbing, directly from videos to Atlas and the Unitree G1. Furthermore, it extends across morphologies to the Spot quadruped, enabling acrobatics, such as a continuous backflip, through animation. Together, these results demonstrate robust zero-shot deployment across heterogeneous data sources and embodiments, establishing ZEST as a scalable interface between biological movements and their robotic counterparts.
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
High-Performance Reinforcement Learning on Spot: Optimizing Simulation Parameters with Distributional Measures
Apr 29, 2025This work presents an overview of the technical details behind a high performance reinforcement learning policy deployment with the Spot RL Researcher Development Kit for low level motor access on Boston Dynamics Spot. This represents the first public demonstration of an end to end end reinforcement learning policy deployed on Spot hardware with training code publicly available through Nvidia IsaacLab and deployment code available through Boston Dynamics. We utilize Wasserstein Distance and Maximum Mean Discrepancy to quantify the distributional dissimilarity of data collected on hardware and in simulation to measure our sim2real gap. We use these measures as a scoring function for the Covariance Matrix Adaptation Evolution Strategy to optimize simulated parameters that are unknown or difficult to measure from Spot. Our procedure for modeling and training produces high quality reinforcement learning policies capable of multiple gaits, including a flight phase. We deploy policies capable of over 5.2ms locomotion, more than triple Spots default controller maximum speed, robustness to slippery surfaces, disturbance rejection, and overall agility previously unseen on Spot. We detail our method and release our code to support future work on Spot with the low level API.
Diffuse-CLoC: Guided Diffusion for Physics-based Character Look-ahead Control
Mar 14, 2025We present Diffuse-CLoC, a guided diffusion framework for physics-based look-ahead control that enables intuitive, steerable, and physically realistic motion generation. While existing kinematics motion generation with diffusion models offer intuitive steering capabilities with inference-time conditioning, they often fail to produce physically viable motions. In contrast, recent diffusion-based control policies have shown promise in generating physically realizable motion sequences, but the lack of kinematics prediction limits their steerability. Diffuse-CLoC addresses these challenges through a key insight: modeling the joint distribution of states and actions within a single diffusion model makes action generation steerable by conditioning it on the predicted states. This approach allows us to leverage established conditioning techniques from kinematic motion generation while producing physically realistic motions. As a result, we achieve planning capabilities without the need for a high-level planner. Our method handles a diverse set of unseen long-horizon downstream tasks through a single pre-trained model, including static and dynamic obstacle avoidance, motion in-betweening, and task-space control. Experimental results show that our method significantly outperforms the traditional hierarchical framework of high-level motion diffusion and low-level tracking.
Dynamic Bipedal Maneuvers through Sim-to-Real Reinforcement Learning
Jul 16, 2022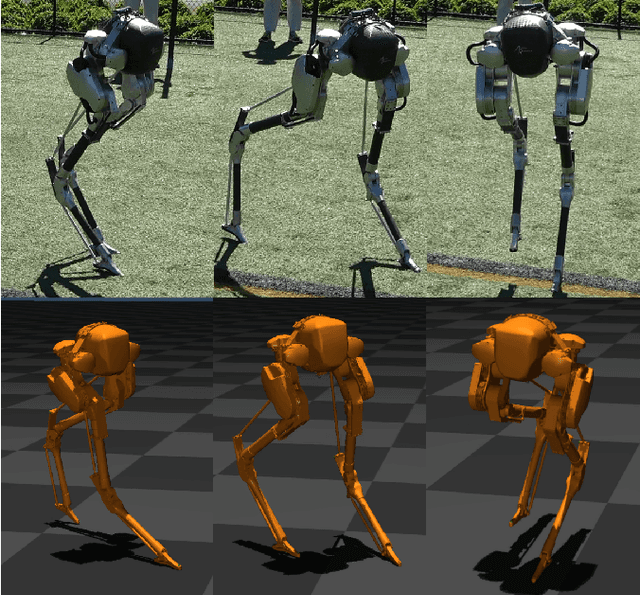
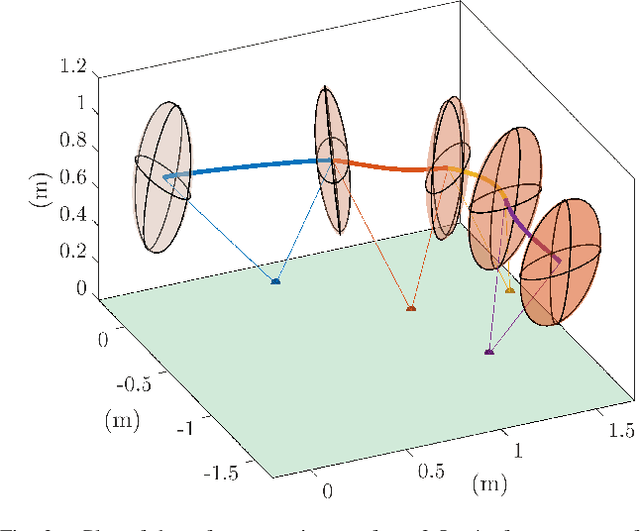
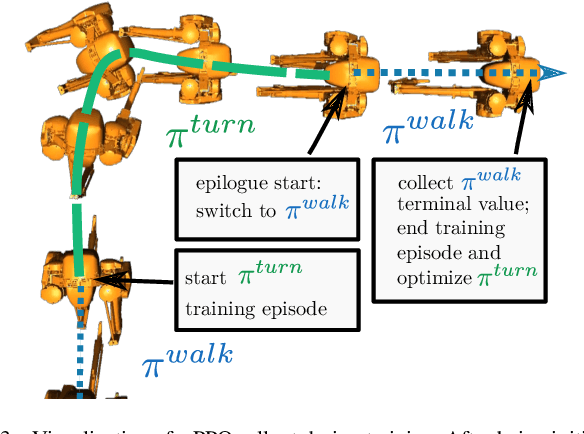
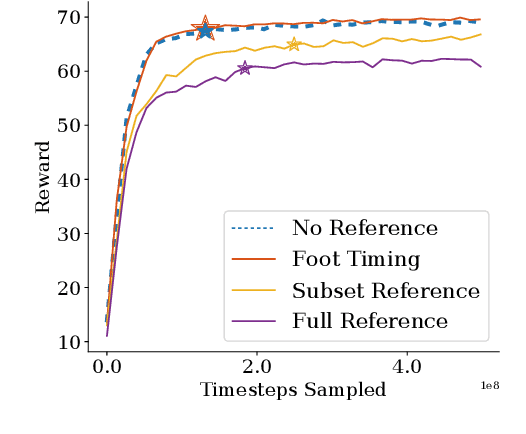
For legged robots to match the athletic capabilities of humans and animals, they must not only produce robust periodic walking and running, but also seamlessly switch between nominal locomotion gaits and more specialized transient maneuvers. Despite recent advancements in controls of bipedal robots, there has been little focus on producing highly dynamic behaviors. Recent work utilizing reinforcement learning to produce policies for control of legged robots have demonstrated success in producing robust walking behaviors. However, these learned policies have difficulty expressing a multitude of different behaviors on a single network. Inspired by conventional optimization-based control techniques for legged robots, this work applies a recurrent policy to execute four-step, 90 degree turns trained using reference data generated from optimized single rigid body model trajectories. We present a novel training framework using epilogue terminal rewards for learning specific behaviors from pre-computed trajectory data and demonstrate a successful transfer to hardware on the bipedal robot Cassie.
Optimizing Bipedal Maneuvers of Single Rigid-Body Models for Reinforcement Learning
Jul 09, 2022

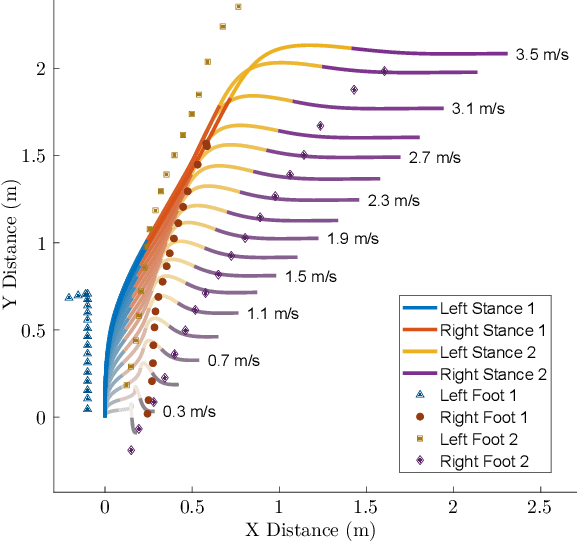
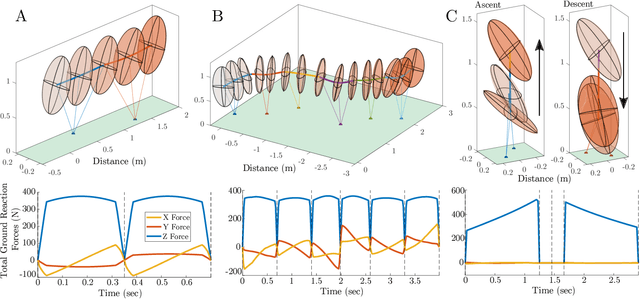
In this work, we propose a method to generate reduced-order model reference trajectories for general classes of highly dynamic maneuvers for bipedal robots for use in sim-to-real reinforcement learning. Our approach is to utilize a single rigid-body model (SRBM) to optimize libraries of trajectories offline to be used as expert references in the reward function of a learned policy. This method translates the model's dynamically rich rotational and translational behaviour to a full-order robot model and successfully transfers to real hardware. The SRBM's simplicity allows for fast iteration and refinement of behaviors, while the robustness of learning-based controllers allows for highly dynamic motions to be transferred to hardware. % Within this work we introduce a set of transferability constraints that amend the SRBM dynamics to actual bipedal robot hardware, our framework for creating optimal trajectories for dynamic stepping, turning maneuvers and jumps as well as our approach to integrating reference trajectories to a reinforcement learning policy. Within this work we introduce a set of transferability constraints that amend the SRBM dynamics to actual bipedal robot hardware, our framework for creating optimal trajectories for a variety of highly dynamic maneuvers as well as our approach to integrating reference trajectories for a high-speed running reinforcement learning policy. We validate our methods on the bipedal robot Cassie on which we were successfully able to demonstrate highly dynamic grounded running gaits up to 3.0 m/s.