 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadar-based Respiratory Rate Monitoring in Standing Position
Mar 09, 2022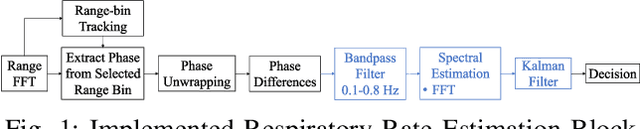

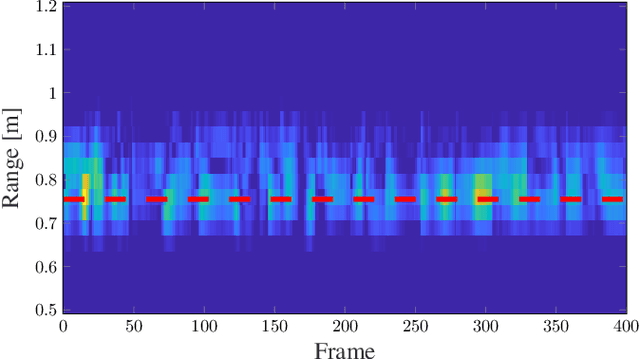
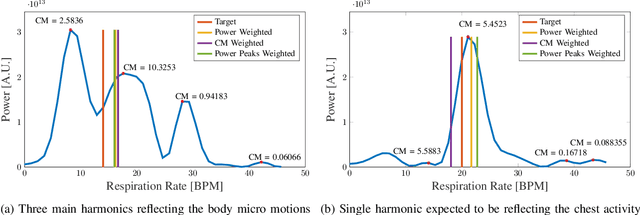
Estimating human vital signs in a contactless non-invasive method using radar provides a convenient method in the medical field to conduct several health checkups easily and quickly. In addition to monitoring while sitting and sleeping, the standing position has aroused interest for both the industrial and medical fields. However, it is more challenging due to the micro motions induced by the body for balancing that may cause false respiratory rate estimation. In this work, we focus on the measurement of the respiratory rate of a standing person accurately with the capability of heavy breath detection and estimation. Multiple estimation approaches are presented and compared, including spectral estimation, deep-learning-based approaches, and adaptive peak selection with Kalman filtering. The latest technique is showing the best performance with an absolute error rate of 1.5 bpm, when compared to a Vernier Go Direct\textsuperscript{\textregistered} respiration belt.
A MIMO Radar-Based Metric Learning Approach for Activity Recognition
Nov 02, 2021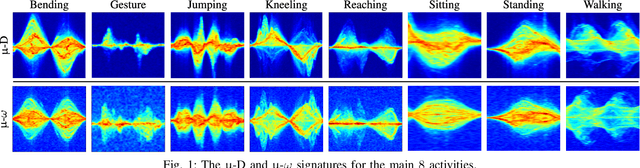
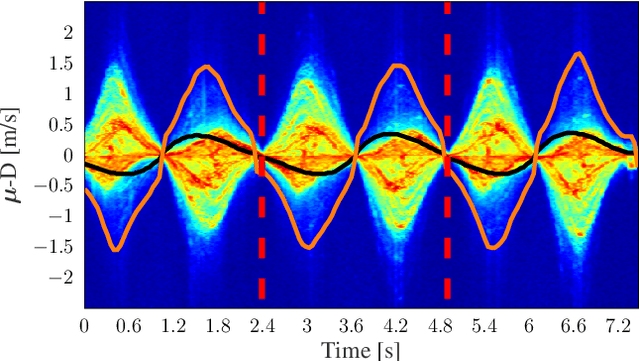
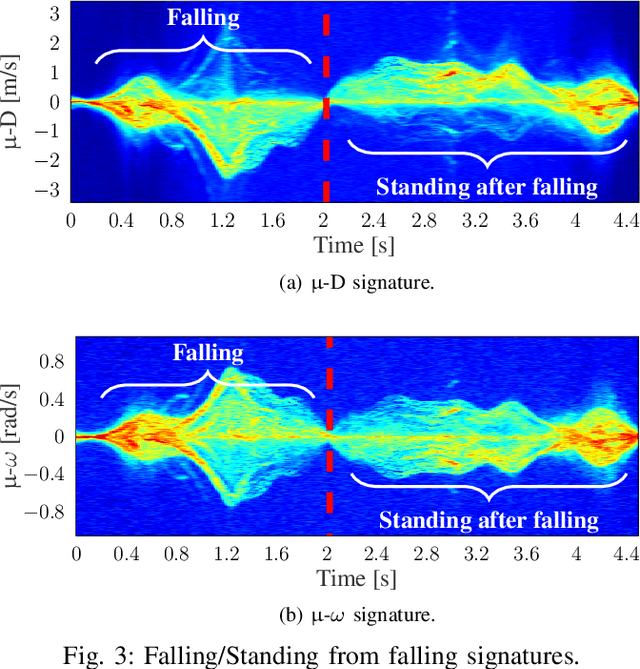
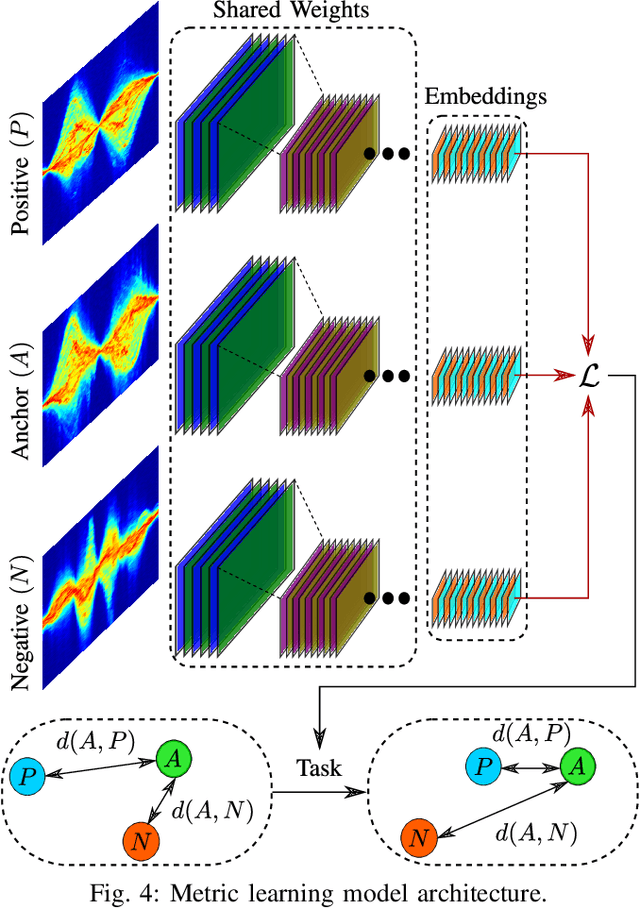
Human activity recognition is seen of great importance in the medical and surveillance fields. Radar has shown great feasibility for this field based on the captured micro-Doppler ({\mu}-D) signatures. In this paper, a MIMO radar is used to formulate a novel micro-motion spectrogram for the angular velocity ({\mu}-{\omega}) in non-tangential scenarios. Combining both the {\mu}-D and the {\mu}-{\omega} signatures have shown better performance. Classification accuracy of 88.9% was achieved based on a metric learning approach. The experimental setup was designed to capture micro-motion signatures on different aspect angles and line of sight (LOS). The utilized training dataset was of smaller size compared to the state-of-the-art techniques, where eight activities were captured. A few-shot learning approach is used to adapt the pre-trained model for fall detection. The final model has shown a classification accuracy of 86.42% for ten activities.
A MIMO Radar-based Few-Shot Learning Approach for Human-ID
Oct 16, 2021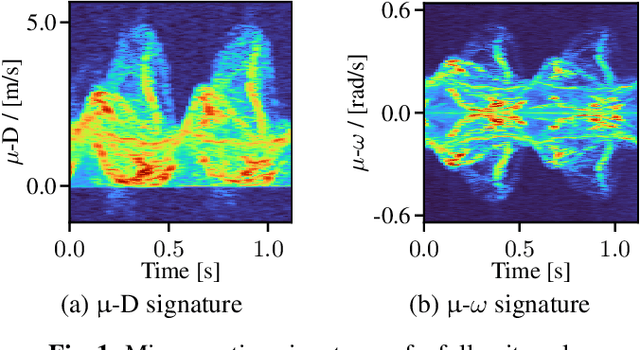
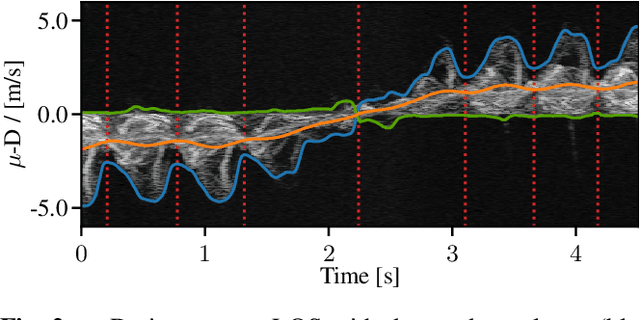
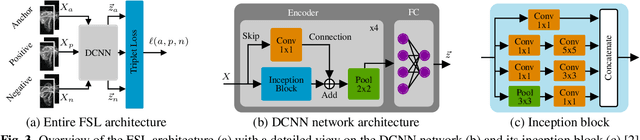
Radar for deep learning-based human identification has become a research area of increasing interest. It has been shown that micro-Doppler (\(\upmu\)-D) can reflect the walking behavior through capturing the periodic limbs' micro-motions. One of the main aspects is maximizing the number of included classes while considering the real-time and training dataset size constraints. In this paper, a multiple-input-multiple-output (MIMO) radar is used to formulate micro-motion spectrograms of the elevation angular velocity (\(\upmu\)-\(\omega\)). The effectiveness of concatenating this newly-formulated spectrogram with the commonly used \(\upmu\)-D is investigated. To accommodate for non-constrained real walking motion, an adaptive cycle segmentation framework is utilized and a metric learning network is trained on half gait cycles (\(\approx\) 0.5 s). Studies on the effects of various numbers of classes (5--20), different dataset sizes, and varying observation time windows 1--2 s are conducted. A non-constrained walking dataset of 22 subjects is collected with different aspect angles with respect to the radar. The proposed few-shot learning (FSL) approach achieves a classification error of 11.3 % with only 2 min of training data per subject.
DimRad: A Radar-Based Perception System for Prosthetic Leg Barrier Traversing
May 30, 2021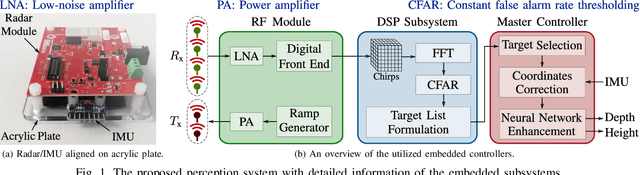
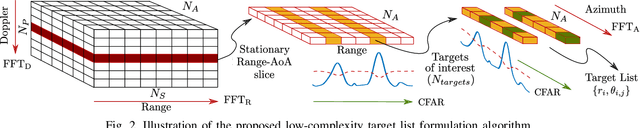
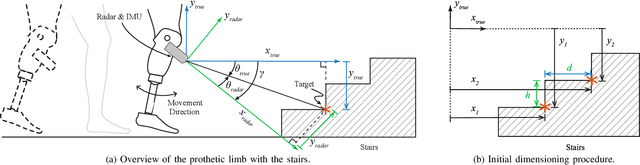
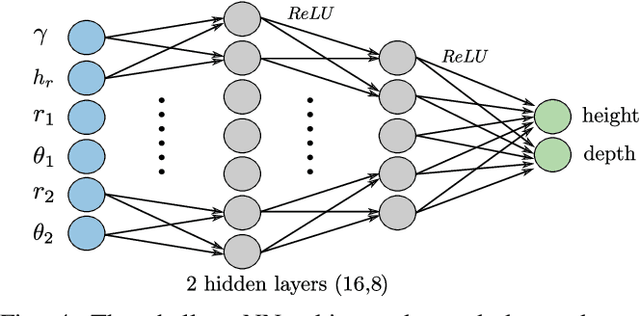
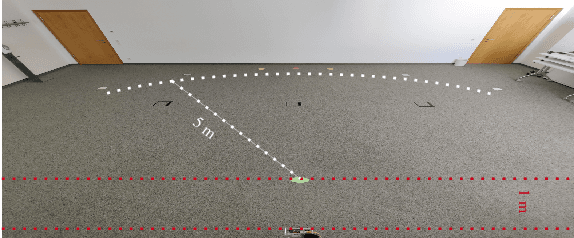
Lower extremity amputees face challenges in natural locomotion, which is partially compensated using powered assistive systems, e.g., micro-processor controlled prosthetic leg. In this paper, a radar-based perception system is proposed to assist prosthetic legs for autonomous obstacle traversing, focusing on multiple-step staircases. The presented perception system is composed of a radar module operating with a multiple-input-multiple-output (MIMO) configuration to localize consecutive stair corners. An inertial measurement unit (IMU) is integrated for coordinates correction due to the angular dis-positioning that occurs because of the knee angular motion. The captured information from both sensors is used for staircase dimensioning (depth and height). A shallow neural network (NN) is proposed to model the error due to the hardware limitations and enhance the dimension estimation accuracy (1 cm). The algorithm is implemented on a microcontroller subsystem of the radar kit to qualify the perception system for embedded integration in powered prosthetic legs.
An Adversarial Super-Resolution Remedy for Radar Design Trade-offs
Mar 04, 2019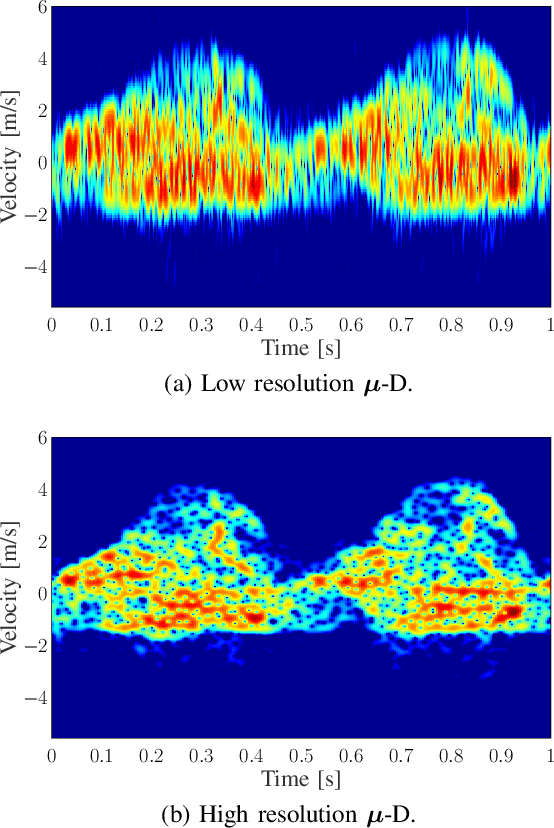
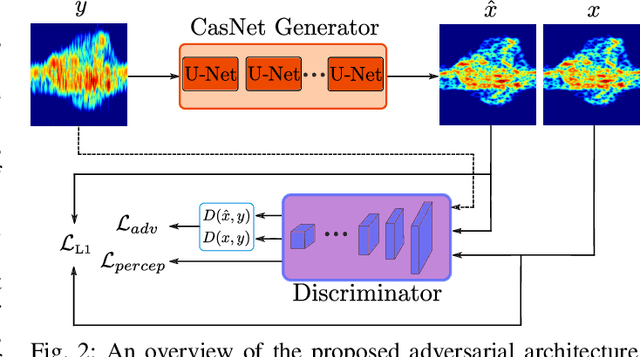
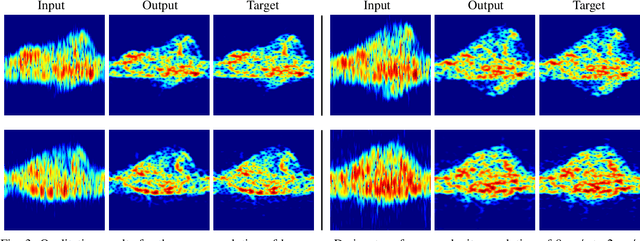
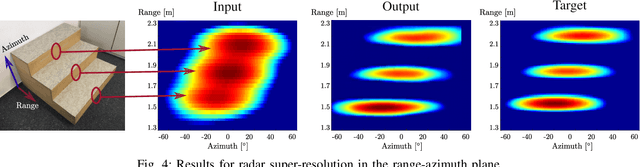
Radar is of vital importance in many fields, such as autonomous driving, safety and surveillance applications. However, it suffers from stringent constraints on its design parametrization leading to multiple trade-offs. For example, the bandwidth in FMCW radars is inversely proportional with both the maximum unambiguous range and range resolution. In this work, we introduce a new method for circumventing radar design trade-offs. We propose the use of recent advances in computer vision, more specifically generative adversarial networks (GANs), to enhance low-resolution radar acquisitions into higher resolution counterparts while maintaining the advantages of the low-resolution parametrization. The capability of the proposed method was evaluated on the velocity resolution and range-azimuth trade-offs in micro-Doppler signatures and FMCW uniform linear array (ULA) radars, respectively.
A Study of Human Body Characteristics Effect on Micro-Doppler-Based Person Identification using Deep Learning
Nov 17, 2018


Obtaining a smart surveillance requires a sensing system that can capture accurate and detailed information for the human walking style. The radar micro-Doppler ($\boldsymbol{\mu}$-D) analysis is proved to be a reliable metric for studying human locomotions. Thus, $\boldsymbol{\mu}$-D signatures can be used to identify humans based on their walking styles. Additionally, the signatures contain information about the radar cross section (RCS) of the moving subject. This paper investigates the effect of human body characteristics on human identification based on their $\boldsymbol{\mu}$-D signatures. In our proposed experimental setup, a treadmill is used to collect $\boldsymbol{\mu}$-D signatures of 22 subjects with different genders and body characteristics. Convolutional autoencoders (CAE) are then used to extract the latent space representation from the $\boldsymbol{\mu}$-D signatures. It is then interpreted in two dimensions using t-distributed stochastic neighbor embedding (t-SNE). Our study shows that the body mass index (BMI) has a correlation with the $\boldsymbol{\mu}$-D signature of the walking subject. A 50-layer deep residual network is then trained to identify the walking subject based on the $\boldsymbol{\mu}$-D signature. We achieve an accuracy of 98% on the test set with high signal-to-noise-ratio (SNR) and 84% in case of different SNR levels.
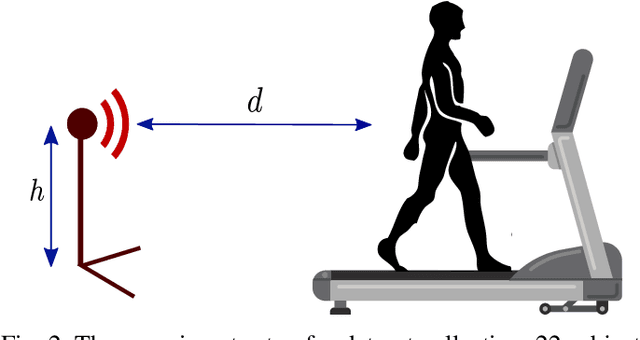
Towards Adversarial Denoising of Radar Micro-Doppler Signatures
Nov 12, 2018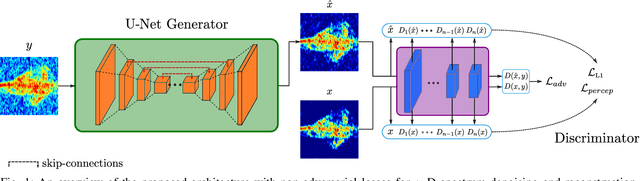
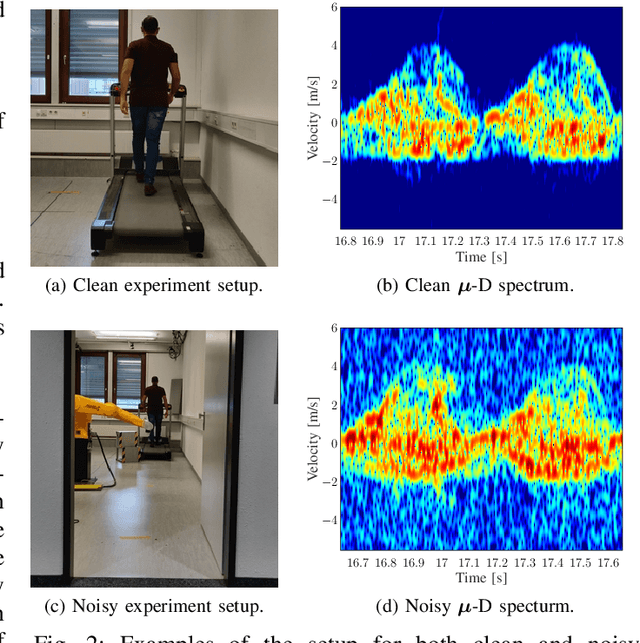
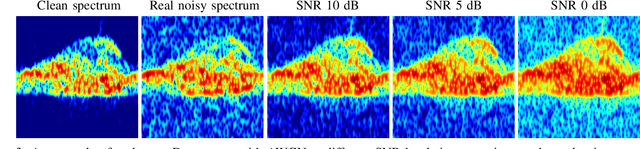
Generative Adversarial Networks (GANs) are considered the state-of-the-art in the field of image generation. They learn the joint distribution of the training data and attempt to generate new data samples in high dimensional space following the same distribution as the input. Recent improvements in GANs opened the field to many other computer vision applications based on improving and changing the characteristics of the input image to follow some given training requirements. In this paper, we propose a novel technique for the denoising and reconstruction of the micro-Doppler ($\boldsymbol{\mu}$-D) spectra of walking humans based on GANs. Two sets of experiments were collected on 22 subjects walking on a treadmill at an intermediate velocity using a \unit[25]{GHz} CW radar. In one set, a clean $\boldsymbol{\mu}$-D spectrum is collected for each subject by placing the radar at a close distance to the subject. In the other set, variations are introduced in the experiment setup to introduce different noise and clutter effects on the spectrum by changing the distance and placing reflective objects between the radar and the target. Synthetic paired noisy and noise-free spectra were used for training, while validation was carried out on the real noisy measured data. Finally, qualitative and quantitative comparison with other classical radar denoising approaches in the literature demonstrated the proposed GANs framework is better and more robust to different noise levels.
Micro-Doppler Based Human-Robot Classification Using Ensemble and Deep Learning Approaches
Feb 26, 2018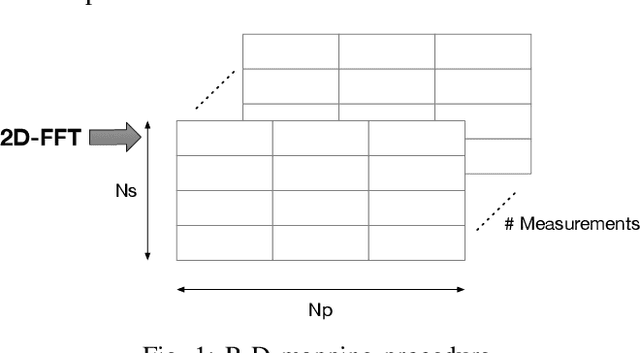

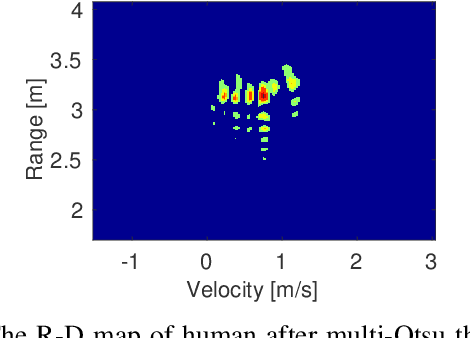
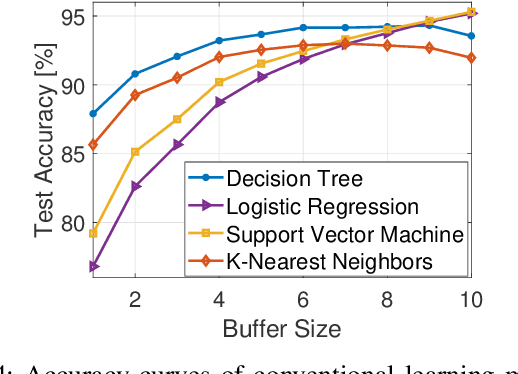
Radar sensors can be used for analyzing the induced frequency shifts due to micro-motions in both range and velocity dimensions identified as micro-Doppler ($\boldsymbol{\mu}$-D) and micro-Range ($\boldsymbol{\mu}$-R), respectively. Different moving targets will have unique $\boldsymbol{\mu}$-D and $\boldsymbol{\mu}$-R signatures that can be used for target classification. Such classification can be used in numerous fields, such as gait recognition, safety and surveillance. In this paper, a 25 GHz FMCW Single-Input Single-Output (SISO) radar is used in industrial safety for real-time human-robot identification. Due to the real-time constraint, joint Range-Doppler (R-D) maps are directly analyzed for our classification problem. Furthermore, a comparison between the conventional classical learning approaches with handcrafted extracted features, ensemble classifiers and deep learning approaches is presented. For ensemble classifiers, restructured range and velocity profiles are passed directly to ensemble trees, such as gradient boosting and random forest without feature extraction. Finally, a Deep Convolutional Neural Network (DCNN) is used and raw R-D images are directly fed into the constructed network. DCNN shows a superior performance of 99\% accuracy in identifying humans from robots on a single R-D map.
* 6 pages, accepted in IEEE Radar Conference 2018
Stairs Detection for Enhancing Wheelchair Capabilities Based on Radar Sensors
Nov 25, 2017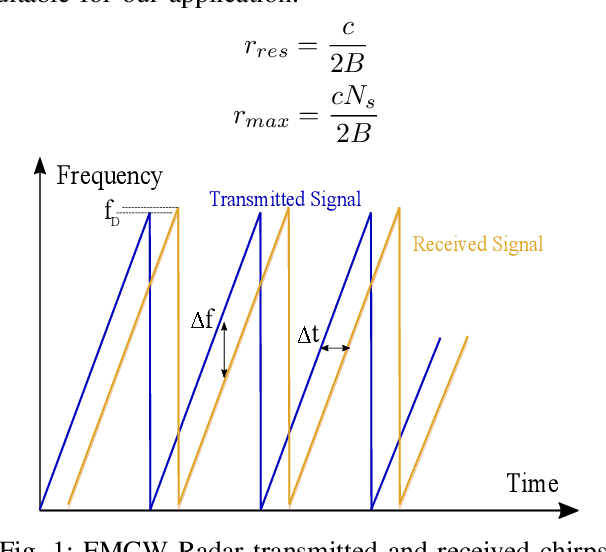

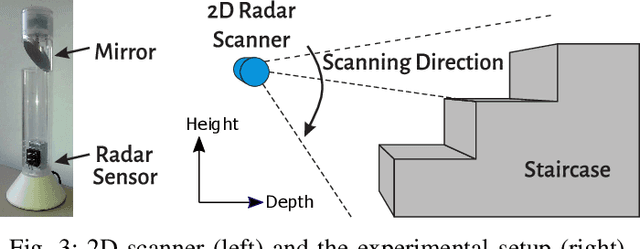

Powered wheelchair users encounter barriers to their mobility everyday. Entering a building with non barrier-free areas can massively impact the user mobility related activities. There are a few commercial devices and some experimental that can climb stairs using for instance adaptive wheels with joints or caterpillar drive. These systems rely on the use for sensing and control. For safe automated obstacle crossing, a robust and environment invariant detection of the surrounding is necessary. Radar may prove to be a suitable sensor for its capability to handle harsh outdoor environmental conditions. In this paper, we introduce a mirror based two dimensional Frequency-Modulated Continuous-Wave (FMCW) radar scanner for stair detection. A radar image based stair dimensioning approach is presented and tested under laboratory and realistic conditions.
* 5 pages, Accepted and presented in 2017 IEEE 6th Global Conference on Consumer Electronics (GCCE 2017)
Real-Time Capable Micro-Doppler Signature Decomposition of Walking Human Limbs
Nov 25, 2017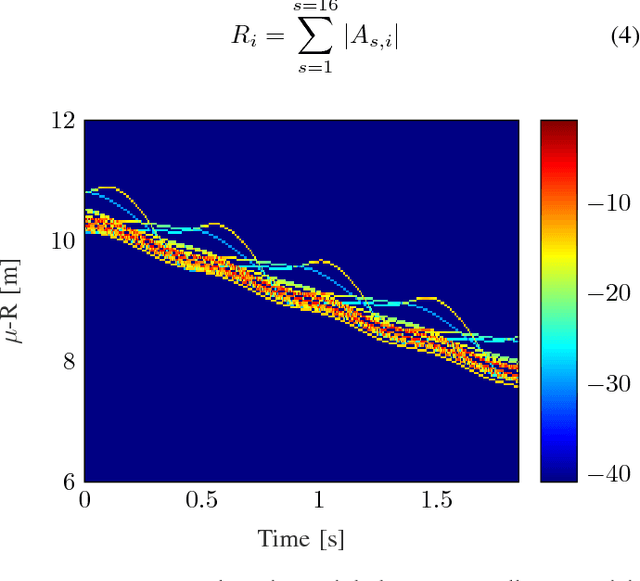
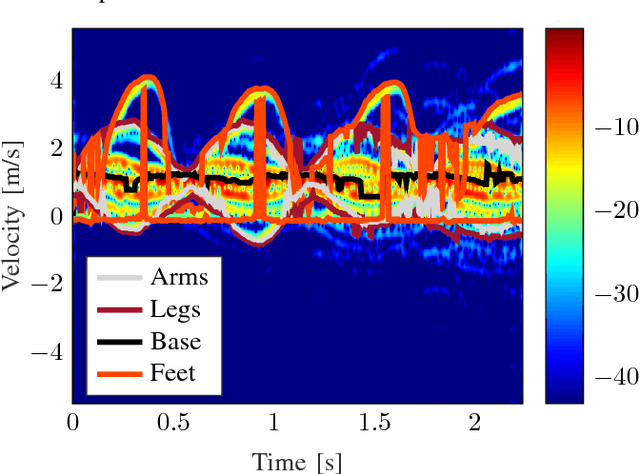
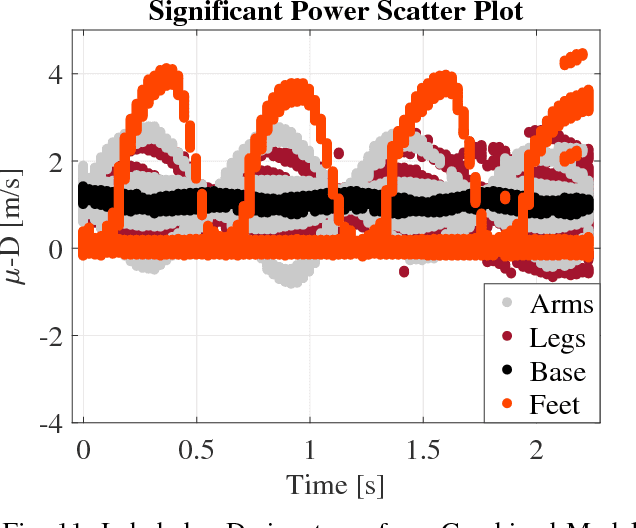
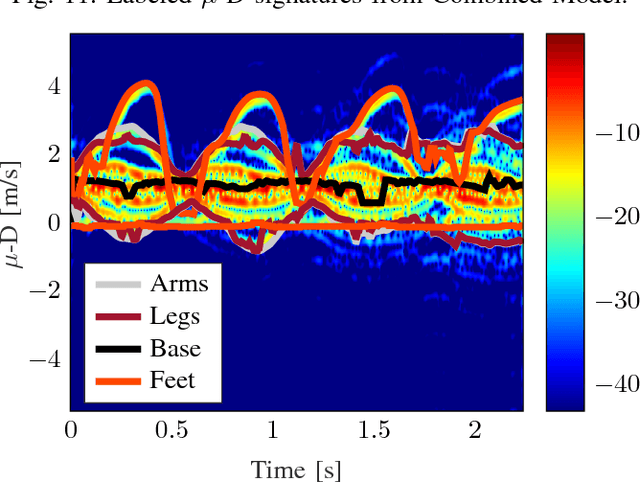
Unique micro-Doppler signature ($\boldsymbol{\mu}$-D) of a human body motion can be analyzed as the superposition of different body parts $\boldsymbol{\mu}$-D signatures. Extraction of human limbs $\boldsymbol{\mu}$-D signatures in real-time can be used to detect, classify and track human motion especially for safety application. In this paper, two methods are combined to simulate $\boldsymbol{\mu}$-D signatures of a walking human. Furthermore, a novel limbs $\mu$-D signature time independent decomposition feasibility study is presented based on features as $\mu$-D signatures and range profiles also known as micro-Range ($\mu$-R). Walking human body parts can be divided into four classes (base, arms, legs, feet) and a decision tree classifier is used. Validation is done and the classifier is able to decompose $\mu$-D signatures of limbs from a walking human signature on real-time basis.
* 6 pages, IEEE RadarConf 17