 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic Lagrangian Turbulence by Generative Diffusion Models
Jul 17, 2023Lagrangian turbulence lies at the core of numerous applied and fundamental problems related to the physics of dispersion and mixing in engineering, bio-fluids, atmosphere, oceans, and astrophysics. Despite exceptional theoretical, numerical, and experimental efforts conducted over the past thirty years, no existing models are capable of faithfully reproducing statistical and topological properties exhibited by particle trajectories in turbulence. We propose a machine learning approach, based on a state-of-the-art Diffusion Model, to generate single-particle trajectories in three-dimensional turbulence at high Reynolds numbers, thereby bypassing the need for direct numerical simulations or experiments to obtain reliable Lagrangian data. Our model demonstrates the ability to quantitatively reproduce all relevant statistical benchmarks over the entire range of time scales, including the presence of fat tails distribution for the velocity increments, anomalous power law, and enhancement of intermittency around the dissipative scale. The model exhibits good generalizability for extreme events, achieving unprecedented intensity and rarity. This paves the way for producing synthetic high-quality datasets for pre-training various downstream applications of Lagrangian turbulence.
Generative Adversarial Networks to infer velocity components in rotating turbulent flows
Jan 18, 2023Inference problems for two-dimensional snapshots of rotating turbulent flows are studied. We perform a systematic quantitative benchmark of point-wise and statistical reconstruction capabilities of the linear Extended Proper Orthogonal Decomposition (EPOD) method, a non-linear Convolutional Neural Network (CNN) and a Generative Adversarial Network (GAN). We attack the important task of inferring one velocity component out of the measurement of a second one, and two cases are studied: (I) both components lay in the plane orthogonal to the rotation axis and (II) one of the two is parallel to the rotation axis. We show that EPOD method works well only for the former case where both components are strongly correlated, while CNN and GAN always outperform EPOD both concerning point-wise and statistical reconstructions. For case (II), when the input and output data are weakly correlated, all methods fail to reconstruct faithfully the point-wise information. In this case, only GAN is able to reconstruct the field in a statistical sense. The analysis is performed using both standard validation tools based on L2 spatial distance between the prediction and the ground truth and more sophisticated multi-scale analysis using wavelet decomposition. Statistical validation is based on standard Jensen-Shannon divergence between the probability density functions, spectral properties and multi-scale flatness.
DropTrack -- automatic droplet tracking using deep learning for microfluidic applications
May 05, 2022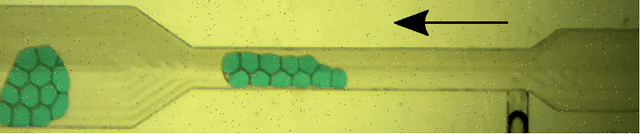
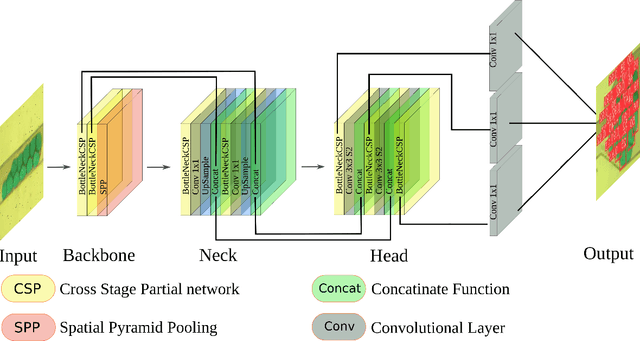
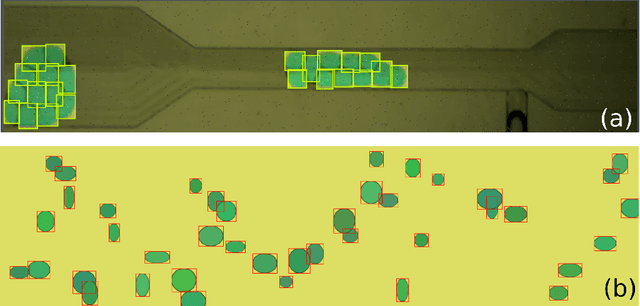
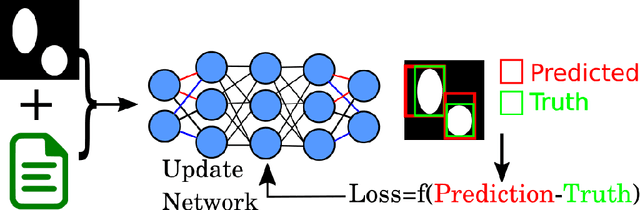
Deep neural networks are rapidly emerging as data analysis tools, often outperforming the conventional techniques used in complex microfluidic systems. One fundamental analysis frequently desired in microfluidic experiments is counting and tracking the droplets. Specifically, droplet tracking in dense emulsions is challenging as droplets move in tightly packed configurations. Sometimes the individual droplets in these dense clusters are hard to resolve, even for a human observer. Here, two deep learning-based cutting-edge algorithms for object detection (YOLO) and object tracking (DeepSORT) are combined into a single image analysis tool, DropTrack, to track droplets in microfluidic experiments. DropTrack analyzes input videos, extracts droplets' trajectories, and infers other observables of interest, such as droplet numbers. Training an object detector network for droplet recognition with manually annotated images is a labor-intensive task and a persistent bottleneck. This work partly resolves this problem by training object detector networks (YOLOv5) with hybrid datasets containing real and synthetic images. We present an analysis of a double emulsion experiment as a case study to measure DropTrack's performance. For our test case, the YOLO networks trained with 60% synthetic images show similar performance in droplet counting as with the one trained using 100% real images, meanwhile saving the image annotation work by 60%. DropTrack's performance is measured in terms of mean average precision (mAP), mean square error in counting the droplets, and inference speed. The fastest configuration of DropTrack runs inference at about 30 frames per second, well within the standards for real-time image analysis.
Inferring Turbulent Parameters via Machine Learning
Jan 03, 2022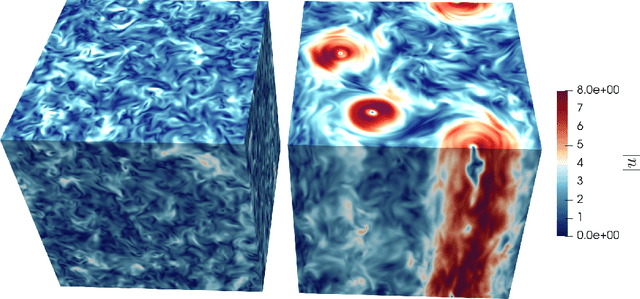
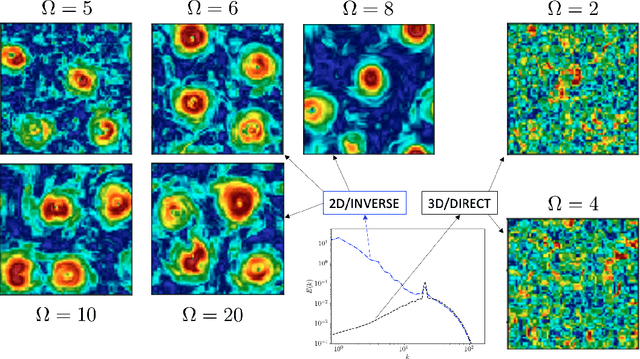
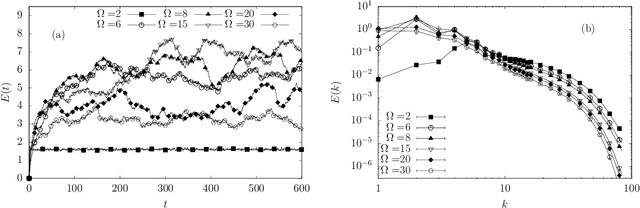
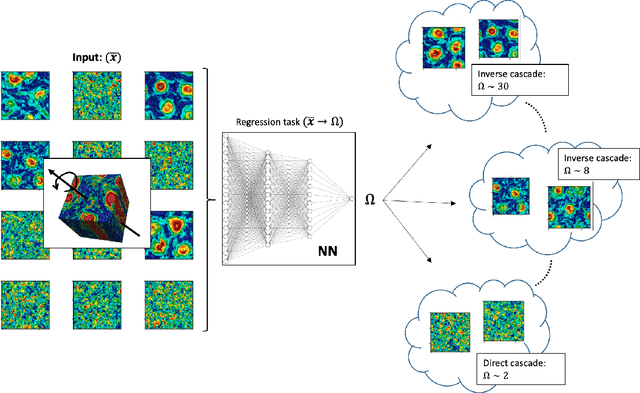
We design a machine learning technique to solve the general problem of inferring physical parameters from the observation of turbulent flows, a relevant exercise in many theoretical and applied fields, from engineering to earth observation and astrophysics. Our approach is to train the machine learning system to regress the rotation frequency of the flow's reference frame, from the observation of the flow's velocity amplitude on a 2d plane extracted from the 3d domain. The machine learning approach consists of a Deep Convolutional Neural Network (DCNN) of the same kind developed in computer vision. The training and validation datasets are produced by means of fully resolved direct numerical simulations. This study shows interesting results from two different points of view. From the machine learning point of view it shows the potential of DCNN, reaching good results on such a particularly complex problem that goes well outside the limits of human vision. Second, from the physics point of view, it provides an example on how machine learning can be exploited in data analysis to infer information that would be inaccessible otherwise. Indeed, by comparing DCNN with the other possible Bayesian approaches, we find that DCNN yields to a much higher inference accuracy in all the examined cases.
Optimal control of point-to-point navigation in turbulent time-dependent flows using Reinforcement Learning
Feb 27, 2021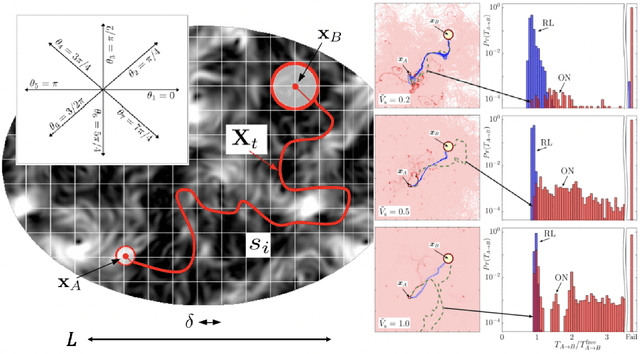

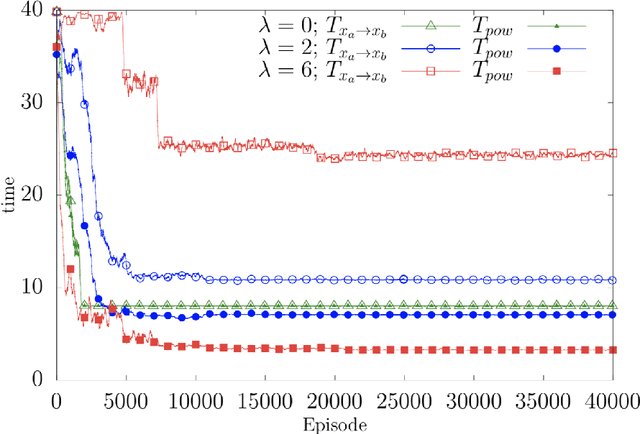
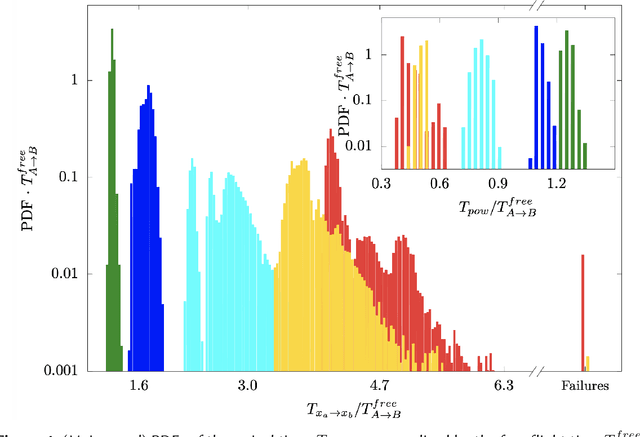
We present theoretical and numerical results concerning the problem to find the path that minimizes the time to navigate between two given points in a complex fluid under realistic navigation constraints. We contrast deterministic Optimal Navigation (ON) control with stochastic policies obtained by Reinforcement Learning (RL) algorithms. We show that Actor-Critic RL algorithms are able to find quasi-optimal solutions in the presence of either time-independent or chaotically evolving flow configurations. For our application, ON solutions develop unstable behavior within the typical duration of the navigation process, and are therefore not useful in practice. We first explore navigation of turbulent flow using a constant propulsion speed. Based on a discretized phase-space, the propulsion direction is adjusted with the aim to minimize the time spent to reach the target. Further, we explore a case where additional control is obtained by allowing the engine to power off. Exploiting advection of the underlying flow, allows the target to be reached with less energy consumption. In this case, we optimize a linear combination between the total navigation time and the total time the engine is switched off. Our approach can be generalized to other setups, for example, navigation under imperfect environmental forecast or with different models for the moving vessel.
Zermelo's problem: Optimal point-to-point navigation in 2D turbulent flows using Reinforcement Learning
Jul 17, 2019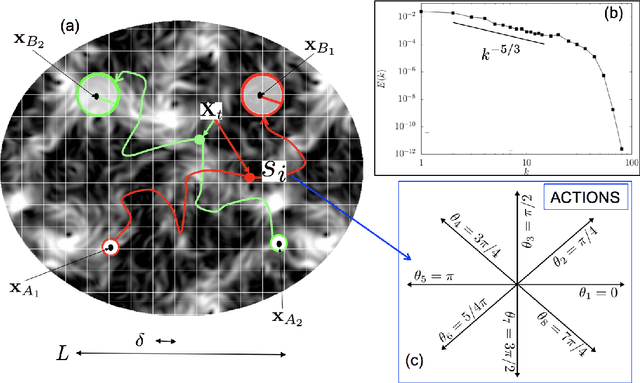
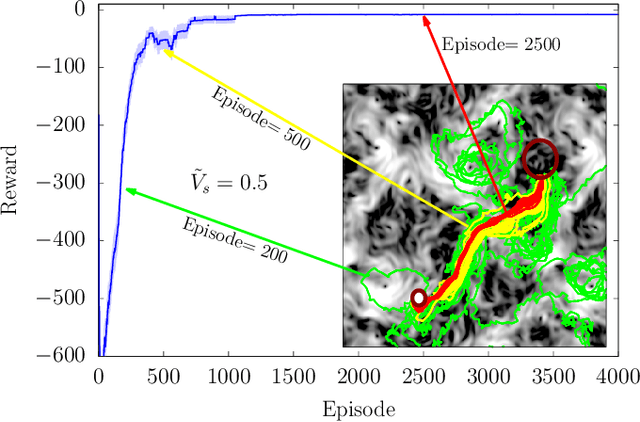


To find the path that minimizes the time to navigate between two given points in a fluid flow is known as the Zermelo's problem. Here, we investigate it by using a Reinforcement Learning (RL) approach for the case of a vessel which has a slip velocity with fixed intensity, V_s, but variable direction and navigating in a 2D turbulent sea. We use an Actor-Critic RL algorithm, and compare the results with strategies obtained analytically from continuous Optimal Navigation (ON) protocols. We show that for our application, ON solutions are unstable for the typical duration of the navigation process, and are therefore not useful in practice. On the other hand, RL solutions are much more robust with respect to small changes in the initial conditions and to external noise, and are able to find optimal trajectories even when V_s is much smaller than the maximum flow velocity. Furthermore, we show how the RL approach is able to take advantage of the flow properties in order to reach the target, especially when the steering speed is small.