 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Programming-Based Offline Redundancy Resolution of Redundant Manipulators Along Prescribed Paths with Real-Time Adjustment
Nov 26, 2024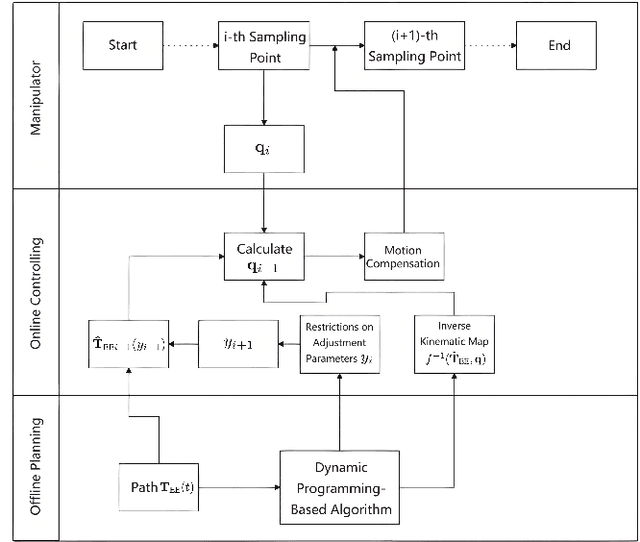
Traditional offline redundancy resolution of trajectories for redundant manipulators involves computing inverse kinematic solutions for Cartesian space paths, constraining the manipulator to a fixed path without real-time adjustments. Online redundancy resolution can achieve real-time adjustment of paths, but it cannot consider subsequent path points, leading to the possibility of the manipulator being forced to stop mid-motion due to joint constraints. To address this, this paper introduces a dynamic programming-based offline redundancy resolution for redundant manipulators along prescribed paths with real-time adjustment. The proposed method allows the manipulator to move along a prescribed path while implementing real-time adjustment along the normal to the path. Using Dynamic Programming, the proposed approach computes a global maximum for the variation of adjustment coefficients. As long as the coefficient variation between adjacent sampling path points does not exceed this limit, the algorithm provides the next path point's joint angles based on the current joint angles, enabling the end-effector to achieve the adjusted Cartesian pose. The main innovation of this paper lies in augmenting traditional offline optimal planning with real-time adjustment capabilities, achieving a fusion of offline planning and online planning.
Dynamic Programming-Based Redundancy Resolution for Path Planning of Redundant Manipulators Considering Breakpoints
Nov 26, 2024



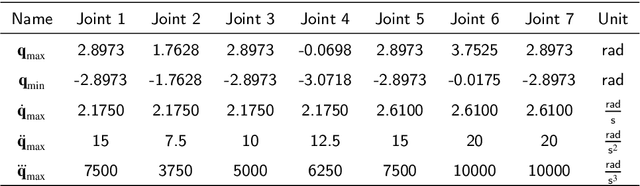
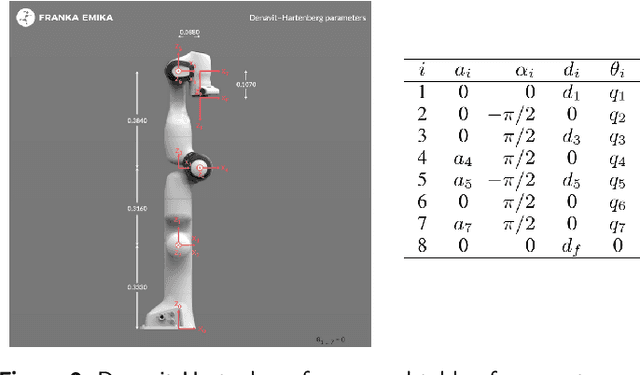
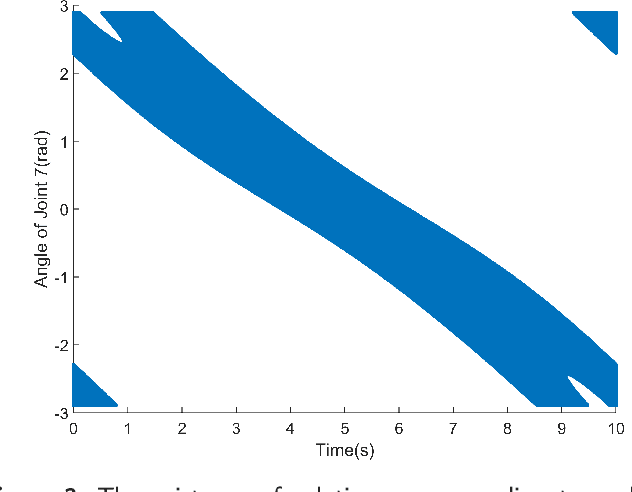
This paper proposes a redundancy resolution algorithm for a redundant manipulator based on dynamic programming. This algorithm can compute the desired joint angles at each point on a pre-planned discrete path in Cartesian space, while ensuring that the angles, velocities, and accelerations of each joint do not exceed the manipulator's constraints. We obtain the analytical solution to the inverse kinematics problem of the manipulator using a parameterization method, transforming the redundancy resolution problem into an optimization problem of determining the parameters at each path point. The constraints on joint velocity and acceleration serve as constraints for the optimization problem. Then all feasible inverse kinematic solutions for each pose under the joint angle constraints of the manipulator are obtained through parameterization methods, and the globally optimal solution to this problem is obtained through the dynamic programming algorithm. On the other hand, if a feasible joint-space path satisfying the constraints does not exist, the proposed algorithm can compute the minimum number of breakpoints required for the path and partition the path with as few breakpoints as possible to facilitate the manipulator's operation along the path. The algorithm can also determine the optimal selection of breakpoints to minimize the global cost function, rather than simply interrupting when the manipulator is unable to continue operating. The proposed algorithm is tested using a manipulator produced by a certain manufacturer, demonstrating the effectiveness of the algorithm.
Learning Safe Policies with Expert Guidance
May 21, 2018
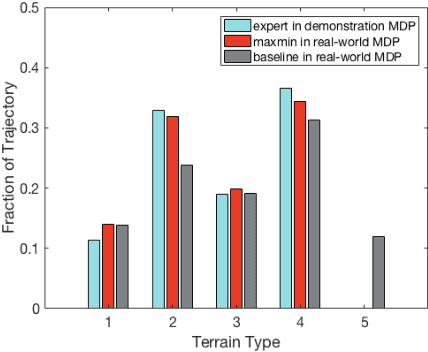
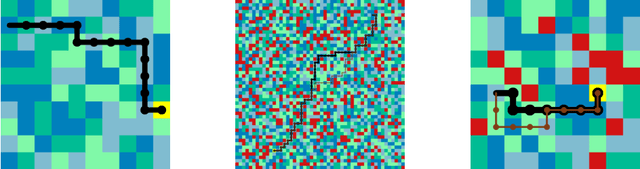
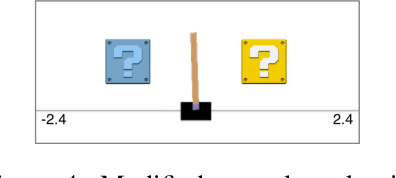
We propose a framework for ensuring safe behavior of a reinforcement learning agent when the reward function may be difficult to specify. In order to do this, we rely on the existence of demonstrations from expert policies, and we provide a theoretical framework for the agent to optimize in the space of rewards consistent with its existing knowledge. We propose two methods to solve the resulting optimization: an exact ellipsoid-based method and a method in the spirit of the "follow-the-perturbed-leader" algorithm. Our experiments demonstrate the behavior of our algorithm in both discrete and continuous problems. The trained agent safely avoids states with potential negative effects while imitating the behavior of the expert in the other states.
Automatic 3D liver location and segmentation via convolutional neural networks and graph cut
May 10, 2016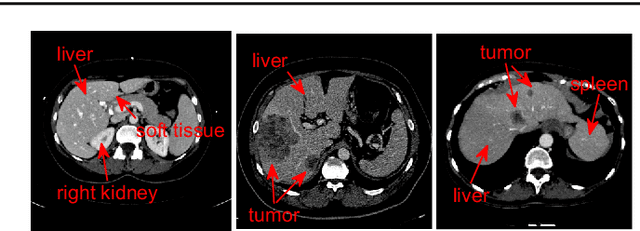
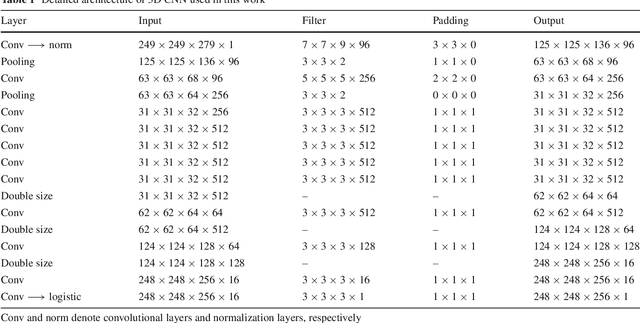
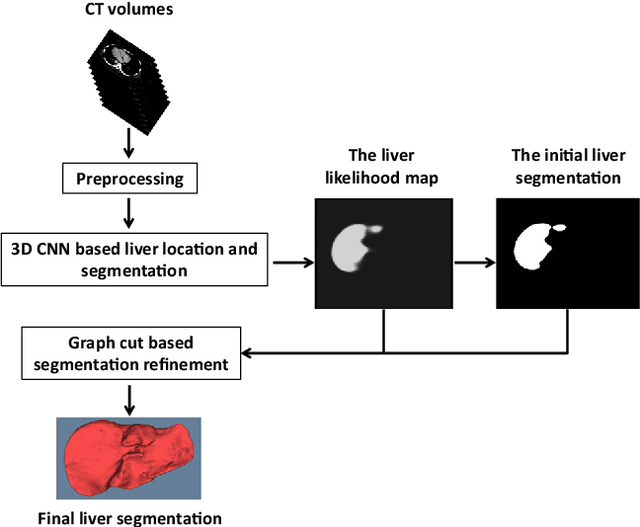
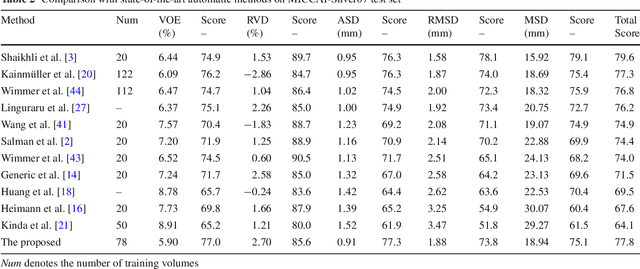
Purpose Segmentation of the liver from abdominal computed tomography (CT) image is an essential step in some computer assisted clinical interventions, such as surgery planning for living donor liver transplant (LDLT), radiotherapy and volume measurement. In this work, we develop a deep learning algorithm with graph cut refinement to automatically segment liver in CT scans. Methods The proposed method consists of two main steps: (i) simultaneously liver detection and probabilistic segmentation using 3D convolutional neural networks (CNNs); (ii) accuracy refinement of initial segmentation with graph cut and the previously learned probability map. Results The proposed approach was validated on forty CT volumes taken from two public databases MICCAI-Sliver07 and 3Dircadb. For the MICCAI-Sliver07 test set, the calculated mean ratios of volumetric overlap error (VOE), relative volume difference (RVD), average symmetric surface distance (ASD), root mean square symmetric surface distance (RMSD) and maximum symmetric surface distance (MSD) are 5.9%, 2.7%, 0.91%, 1.88 mm, and 18.94 mm, respectively. In the case of 20 3Dircadb data, the calculated mean ratios of VOE, RVD, ASD, RMSD and MSD are 9.36%, 0.97%, 1.89%, 4.15 mm and 33.14 mm, respectively. Conclusion The proposed method is fully automatic without any user interaction. Quantitative results reveal that the proposed approach is efficient and accurate for hepatic volume estimation in a clinical setup. The high correlation between the automatic and manual references shows that the proposed method can be good enough to replace the time-consuming and non-reproducible manual segmentation method.
Flip-Rotate-Pooling Convolution and Split Dropout on Convolution Neural Networks for Image Classification
Jul 31, 2015



This paper presents a new version of Dropout called Split Dropout (sDropout) and rotational convolution techniques to improve CNNs' performance on image classification. The widely used standard Dropout has advantage of preventing deep neural networks from overfitting by randomly dropping units during training. Our sDropout randomly splits the data into two subsets and keeps both rather than discards one subset. We also introduce two rotational convolution techniques, i.e. rotate-pooling convolution (RPC) and flip-rotate-pooling convolution (FRPC) to boost CNNs' performance on the robustness for rotation transformation. These two techniques encode rotation invariance into the network without adding extra parameters. Experimental evaluations on ImageNet2012 classification task demonstrate that sDropout not only enhances the performance but also converges faster. Additionally, RPC and FRPC make CNNs more robust for rotation transformations. Overall, FRPC together with sDropout bring $1.18\%$ (model of Zeiler and Fergus~\cite{zeiler2013visualizing}, 10-view, top-1) accuracy increase in ImageNet 2012 classification task compared to the original network.