 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWiSwarm: Age-of-Information-based Wireless Networking for Collaborative Teams of UAVs
Dec 06, 2022



The Age-of-Information (AoI) metric has been widely studied in the theoretical communication networks and queuing systems literature. However, experimental evaluation of its applicability to complex real-world time-sensitive systems is largely lacking. In this work, we develop, implement, and evaluate an AoI-based application layer middleware that enables the customization of WiFi networks to the needs of time-sensitive applications. By controlling the storage and flow of information in the underlying WiFi network, our middleware can: (i) prevent packet collisions; (ii) discard stale packets that are no longer useful; and (iii) dynamically prioritize the transmission of the most relevant information. To demonstrate the benefits of our middleware, we implement a mobility tracking application using a swarm of UAVs communicating with a central controller via WiFi. Our experimental results show that, when compared to WiFi-UDP/WiFi-TCP, the middleware can improve information freshness by a factor of 109x/48x and tracking accuracy by a factor of 4x/6x, respectively. Most importantly, our results also show that the performance gains of our approach increase as the system scales and/or the traffic load increases.
Global Incremental Flight Control for Agile Maneuvering of a Tailsitter Flying Wing
Jul 26, 2022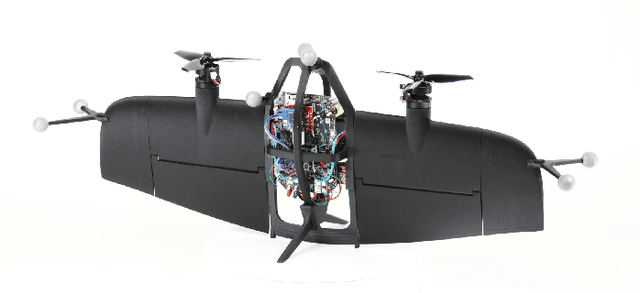
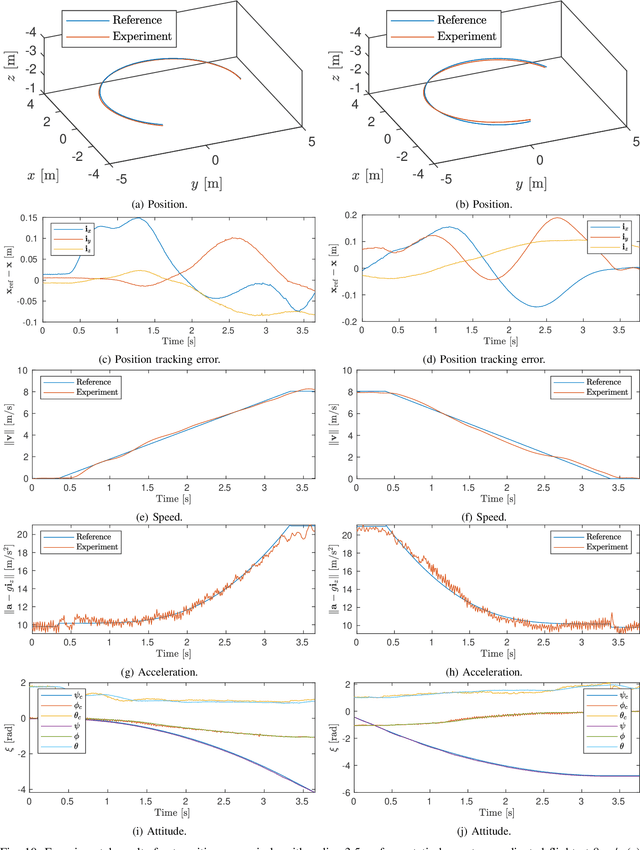


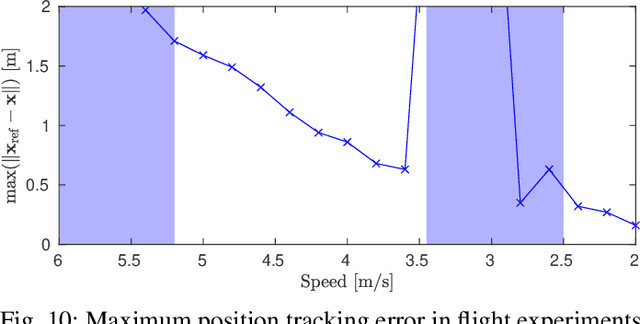
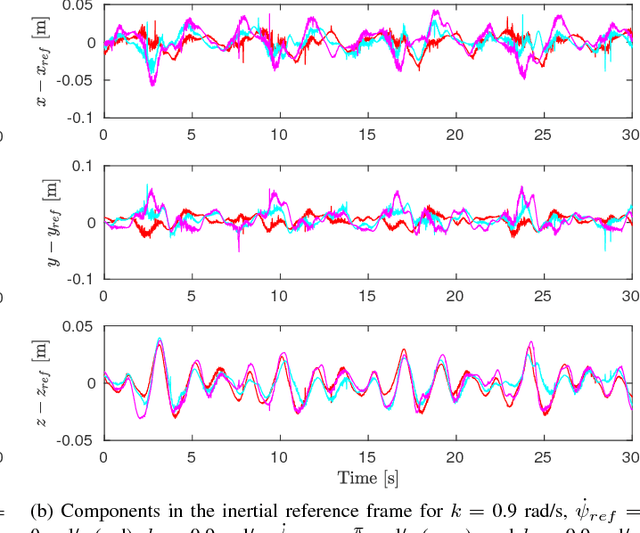
This paper proposes a novel control law for accurate tracking of agile trajectories using a tailsitter flying wing unmanned aerial vehicle (UAV) that transitions between vertical take-off and landing (VTOL) and forward flight. The global control formulation enables maneuvering throughout the flight envelope, including uncoordinated flight with sideslip. Differential flatness of the nonlinear tailsitter dynamics with a simplified aerodynamics model is shown. Using the flatness transform, the proposed controller incorporates tracking of the position reference along with its derivatives velocity, acceleration and jerk, as well as the yaw reference and yaw rate. The inclusion of jerk and yaw rate references through an angular velocity feedforward term improves tracking of trajectories with fast-changing accelerations. The controller does not depend on extensive aerodynamic modeling but instead uses incremental nonlinear dynamic inversion (INDI) to compute control updates based on only a local input-output relation, resulting in robustness against discrepancies in the simplified aerodynamics equations. Exact inversion of the nonlinear input-output relation is achieved through the derived flatness transform. The resulting control algorithm is extensively evaluated in flight tests, where it demonstrates accurate trajectory tracking and challenging agile maneuvers, such as sideways flight and aggressive transitions while turning.
Aerobatic Trajectory Generation for a VTOL Fixed-Wing Aircraft Using Differential Flatness
Jul 07, 2022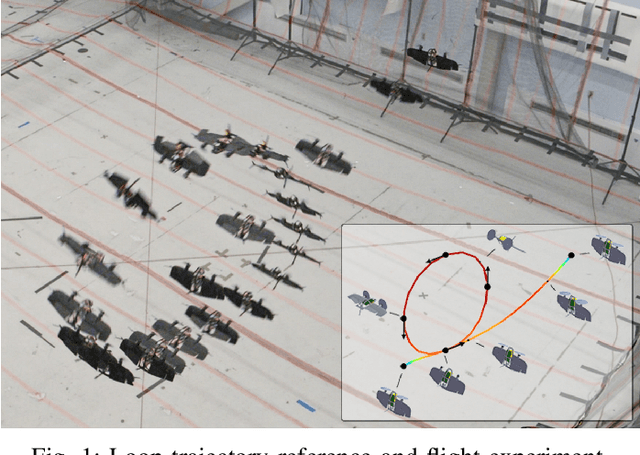
This paper proposes a novel algorithm for aerobatic trajectory generation for a vertical take-off and landing (VTOL) tailsitter flying wing aircraft. The algorithm differs from existing approaches for fixed-wing trajectory generation, as it considers a realistic six-degree-of-freedom (6DOF) flight dynamics model, including aerodynamics equations. Using a global dynamics model enables the generation of aerobatics trajectories that exploit the entire flight envelope, enabling agile maneuvering through the stall regime, sideways uncoordinated flight, inverted flight etc. The method uses the differential flatness property of the global tailsitter flying wing dynamics, which is derived in this work. By performing snap minimization in the differentially flat output space, a computationally efficient algorithm, suitable for online motion planning, is obtained. The algorithm is demonstrated in extensive flight experiments encompassing six aerobatics maneuvers, a time-optimal drone racing trajectory, and an airshow-like aerobatic sequence for three tailsitter aircraft.
Cooperative Multi-Agent Trajectory Generation with Modular Bayesian Optimization
Jun 01, 2022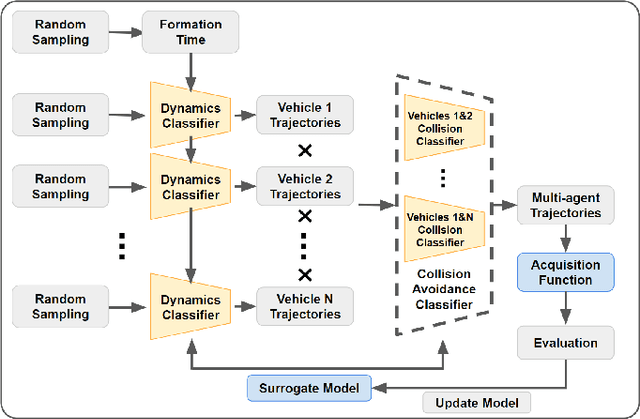
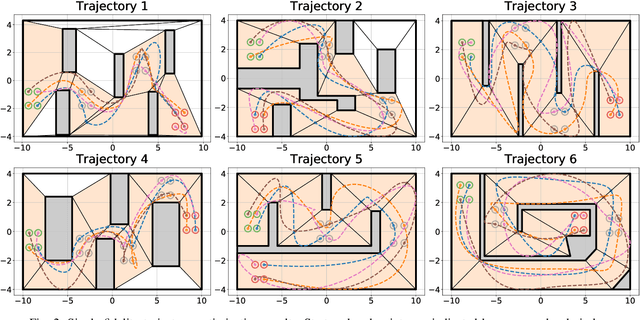
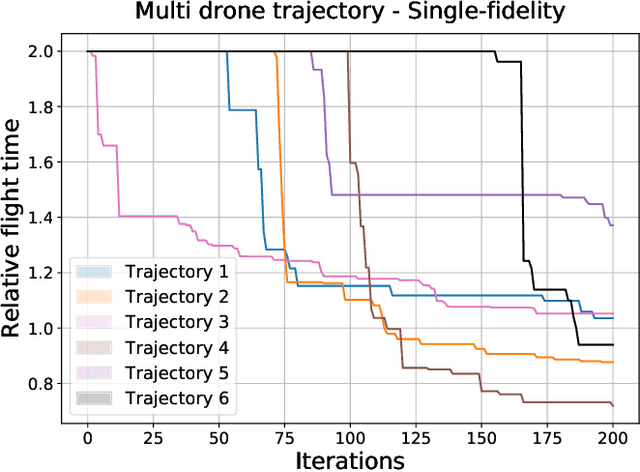
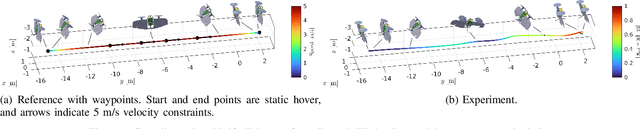
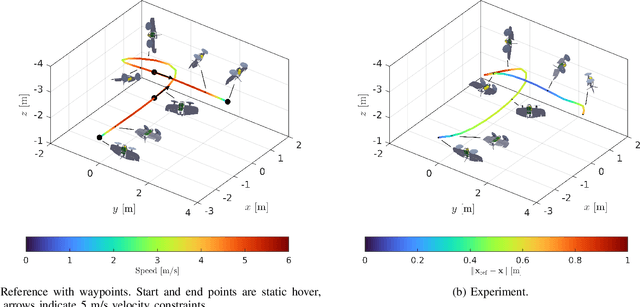
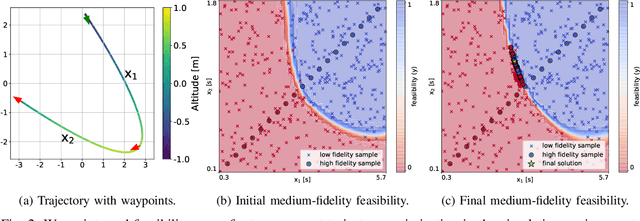
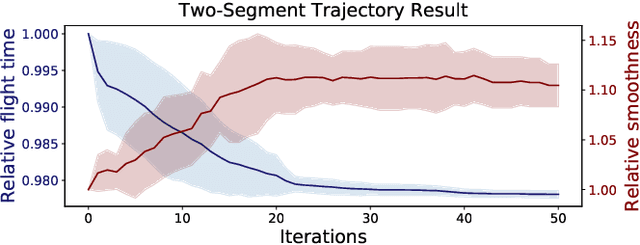
We present a modular Bayesian optimization framework that efficiently generates time-optimal trajectories for a cooperative multi-agent system, such as a team of UAVs. Existing methods for multi-agent trajectory generation often rely on overly conservative constraints to reduce the complexity of this high-dimensional planning problem, leading to suboptimal solutions. We propose a novel modular structure for the Bayesian optimization model that consists of multiple Gaussian process surrogate models that represent the dynamic feasibility and collision avoidance constraints. This modular structure alleviates the stark increase in computational cost with problem dimensionality and enables the use of minimal constraints in the joint optimization of the multi-agent trajectories. The efficiency of the algorithm is further improved by introducing a scheme for simultaneous evaluation of the Bayesian optimization acquisition function and random sampling. The modular BayesOpt algorithm was applied to optimize multi-agent trajectories through six unique environments using multi-fidelity evaluations from various data sources. It was found that the resulting trajectories are faster than those obtained from two baseline methods. The optimized trajectories were validated in real-world experiments using four quadcopters that fly within centimeters of each other at speeds up to 7.4 m/s.
Multi-Fidelity Black-Box Optimization for Time-Optimal Quadrotor Maneuvers
Jun 03, 2020
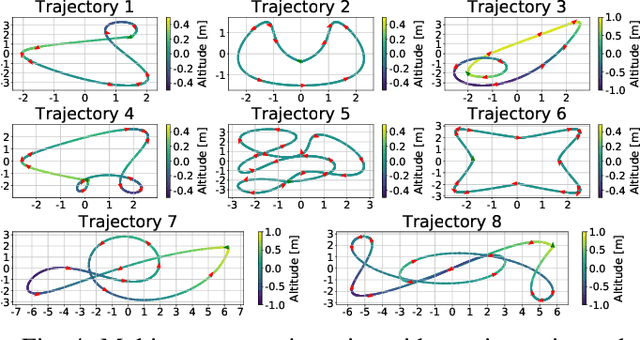
We consider the problem of generating a time-optimal quadrotor trajectory that attains a set of prescribed waypoints. This problem is challenging since the optimal trajectory is located on the boundary of the set of dynamically feasible trajectories. This boundary is hard to model as it involves limitations of the entire system, including hardware and software, in agile high-speed flight. In this work, we propose a multi-fidelity Bayesian optimization framework that models the feasibility constraints based on analytical approximation, numerical simulation, and real-world flight experiments. By combining evaluations at different fidelities, trajectory time is optimized while keeping the number of required costly flight experiments to a minimum. The algorithm is thoroughly evaluated in both simulation and real-world flight experiments at speeds up to 11 m/s. Resulting trajectories were found to be significantly faster than those obtained through minimum-snap trajectory planning.
FlightGoggles: Photorealistic Sensor Simulation for Perception-driven Robotics using Photogrammetry and Virtual Reality
May 27, 2019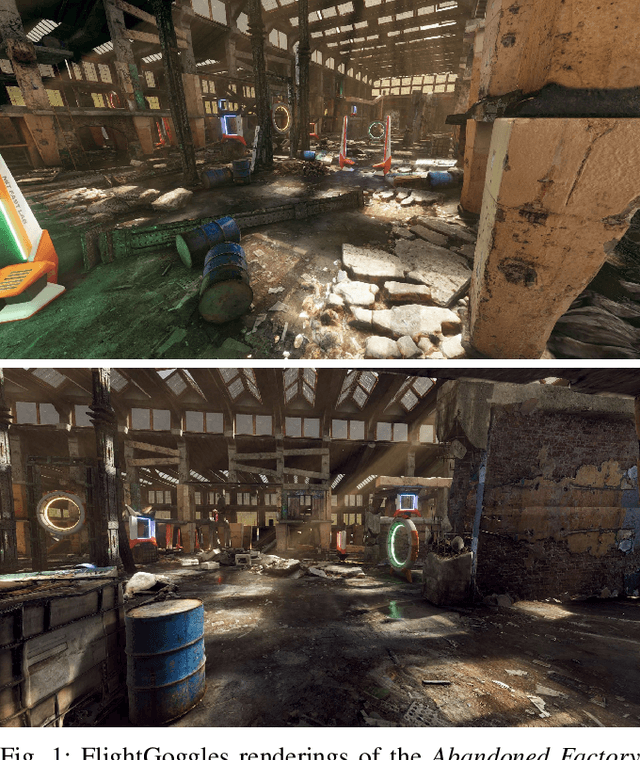
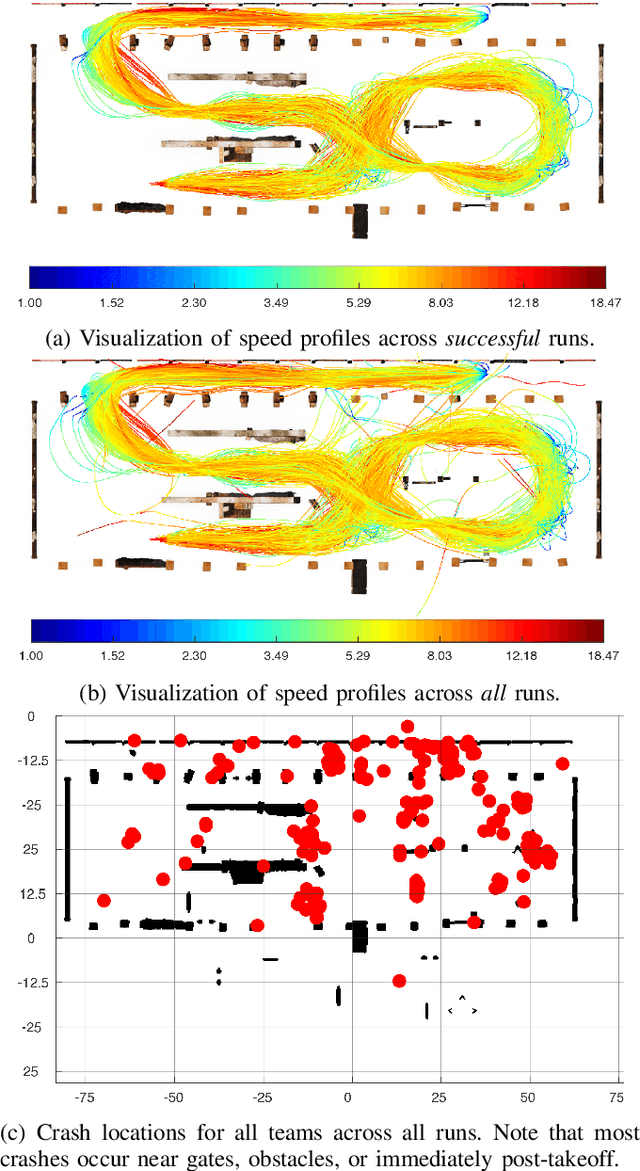
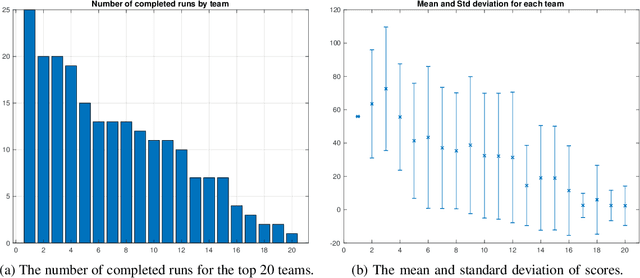
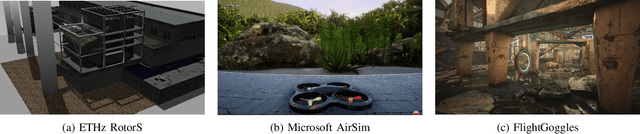
FlightGoggles is a photorealistic sensor simulator for perception-driven robotic vehicles. The key contributions of FlightGoggles are twofold. First, FlightGoggles provides photorealistic exteroceptive sensor simulation using graphics assets generated with photogrammetry. Second, it also provides the ability to combine $\textit{(i)}$ synthetic exteroceptive measurements generated $\textit{in silico}$ in real time and $\textit{(ii)}$ vehicle dynamics and proprioceptive measurements generated $\textit{in motio}$ by vehicle(s) in flight in a motion-capture facility. FlightGoggles is capable of simulating a virtual-reality environment around autonomous vehicle(s) in flight. While a vehicle is in flight in the FlightGoggles virtual reality environment, exteroceptive sensors are rendered synthetically in real time while all complex extrinsic dynamics are generated organically through the natural interactions of the vehicle. The FlightGoggles framework allows for researchers to accelerate development by circumventing the need to estimate complex and hard-to-model interactions such as aerodynamics, motor mechanics, battery electrochemistry, and behavior of other agents. The ability to perform vehicle-in-the-loop experiments with photorealistic exteroceptive sensor simulation facilitates novel research directions involving, $\textit{e.g.}$, fast and agile autonomous flight in obstacle-rich environments, safe human interaction, and flexible sensor selection. FlightGoggles has been utilized as the main test for selecting nine teams that will advance in the AlphaPilot autonomous drone racing challenge. Subsequently, FlightGoggles has been actively used by the community. We survey approaches and results from the top twenty AlphaPilot teams, which may be of independent interest.
Accurate Tracking of Aggressive Quadrotor Trajectories using Incremental Nonlinear Dynamic Inversion and Differential Flatness
Sep 11, 2018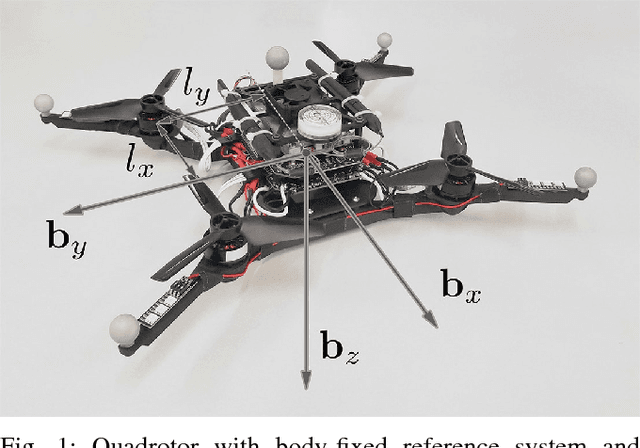
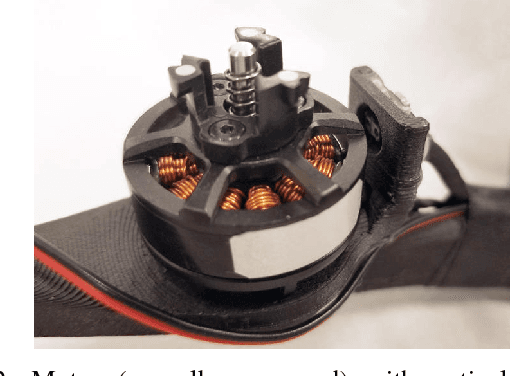
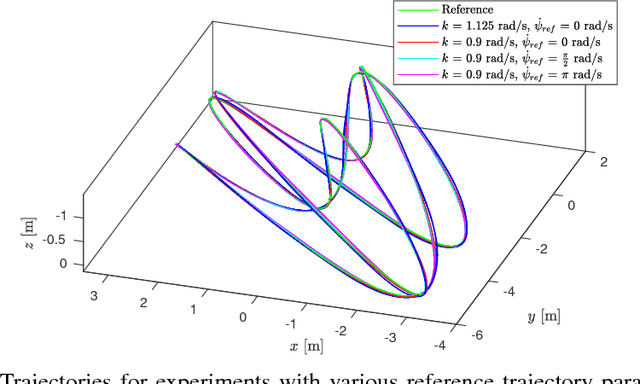
Autonomous unmanned aerial vehicles (UAVs) that can execute aggressive (i.e., high-speed and high-acceleration) maneuvers have attracted significant attention in the past few years. In this paper, we propose a novel control law for accurate tracking of aggressive quadcopter trajectories. The proposed method tracks position and yaw angle with their derivatives of up to fourth order, specifically, the position, velocity, acceleration, jerk, and snap along with the yaw angle, yaw rate and yaw acceleration. Two key aspects of the proposed method are the following. First, the controller exploits the differential flatness of the quadcopter dynamics to generate feedforward inputs for attitude rate and attitude acceleration in order to track the jerk and snap references. The tracking is enabled by direct control of body torque using closed-loop control of all four propeller speeds based on optical encoders attached to the motors. Second, the controller utilizes the incremental nonlinear dynamic inversion (INDI) method for accurate tracking of linear and angular accelerations despite external disturbances. Hence, no prior modeling of aerodynamic effects is required. We rigorously analyze the proposed controller through response analysis, and we demonstrate it in experiments. The proposed control law enables a 1-kg quadcopter UAV to track complex 3D trajectories, reaching speeds up to 8.2 m/s and accelerations up to 2g, while keeping the root-mean-square tracking error down to 4 cm, in a flight volume that is roughly 6.5 m long, 6.5 m wide, and 1.5 m tall. We also demonstrate the robustness of the controller by attaching a drag plate to the UAV in flight tests and by pulling on the UAV with a rope during hover.